{kind=link}
{kind=link}
DeepCGH is an unsupervised, non-iterative algorithm for computer generated holography. DeepCGH relies on convolutional neural networks to perform image plane holography in real-time.
For more details regarding the structure and algorithm refer to the associated manuscript [1]. Please also see our copyright and permission notice in copyright.pdf.
For a hands on tutorial you can also see the DeepCGH_tutorial.ipynb available both on Google Colab and as a Jupyter Notebook (tutorial.ipynb).
-- DeepCGH now includes multi-frame (aka time-averaged, Dynamic CGH) optimization. A new parameter, num_frames determines how many frames with be simultaneously co-optimized. This new module is called DeepDCGH. Please refer to demo_deepdcgh.py for example usage and results.
More information about the technique is available in the associated manuscript.
-- The skimage bug is fixed. Skimage changed circle to disk and that was a problem for many.
Here we provide a Python and Tensorflow implementation of DeepCGH. The current version of this software does not require explicit installation. Dependencies include:
python 3.x
tensorflow-gpu >= 2.0.0
scipy
skimage == 0.19.2
tqdm
If you have Python 3.x (preferably > 3.7), you can easily install package requirements by executing the following command in Ubuntu terminal or Anaconda Prompt on Windows:
pip install tensorflow-gpu==2.3.0 scipy skimage tqdm
This software was not tested on Mac OS but theoretically it should run smoothly independent of the OS.
After the installation of packages is complete, you can clone this repository to your machine using:
git clone https://github.com/UNC-optics/DeepCGH.git
After cloning the repository (see previous section), you can run the demo demo_infinity_loop.py for a simple infinity loop example. In this demo:
First, the parameters of the simulated training dataset are determined:
data = {
'path' : 'DeepCGH_Datasets/Disks',
'shape' : (1152, 1920, 1),
'object_type' : 'Disk',
'object_size' : 10,
'object_count' : [27, 48],
'intensity' : [0.2, 1],
'normalize' : True,
'centralized' : False,
'N' : 10000,
'train_ratio' : 9000/10000,
'file_format' : 'tfrecords',
'compression' : 'GZIP',
'name' : 'target',
}
Please note that you can also provide other datasets (such as natural images) as training data (instructions coming soon). The parameters in this dictionary are:
'shape': The spatial dimensions and number of depth planes of the holograms are determined by theshapeparameter. The convention is (y_dimension, x_dimension, number_of_planes).'path': determines the directory at which the dataset file is stored'object_type': either'Disk','Line', or'Dot'. Determines what kind of object should be randomly generated.'object_size': determines the radius of Disks. Ifobject_type!='Disk'then anything work. Do not leave empty.'object_count': determines the min and max number of objects per plane. Must be a list'intensity': determines the min and max of the intensity of each object. Intensities will be determined randomly.'normalize': a flag that determines whether the intensity of depth planes are normalized with respect to each other. If True, the energy in each depth plane is equal.'centralized': focuses the location of objects in the center. This is a practical feature for real SLMs.'N': the number of samples'train_ratio': determines the portion ofNthat is used for training. The rest is used for testing.'file_format': determines the file format. Either'tfrecords'or'hdf5'.'compression': compression format fortfrecordsdataset. Keep 'GZIP'.'name': the name used intfrecordsfor the input of dataset. TODO: more details and features coming soon.
Please don't leave any of these fields empty even if they are not relevant to the characteristics you have in mind.
Second, the parameters of the model have to be determined. The structure of the CNN is as follows:
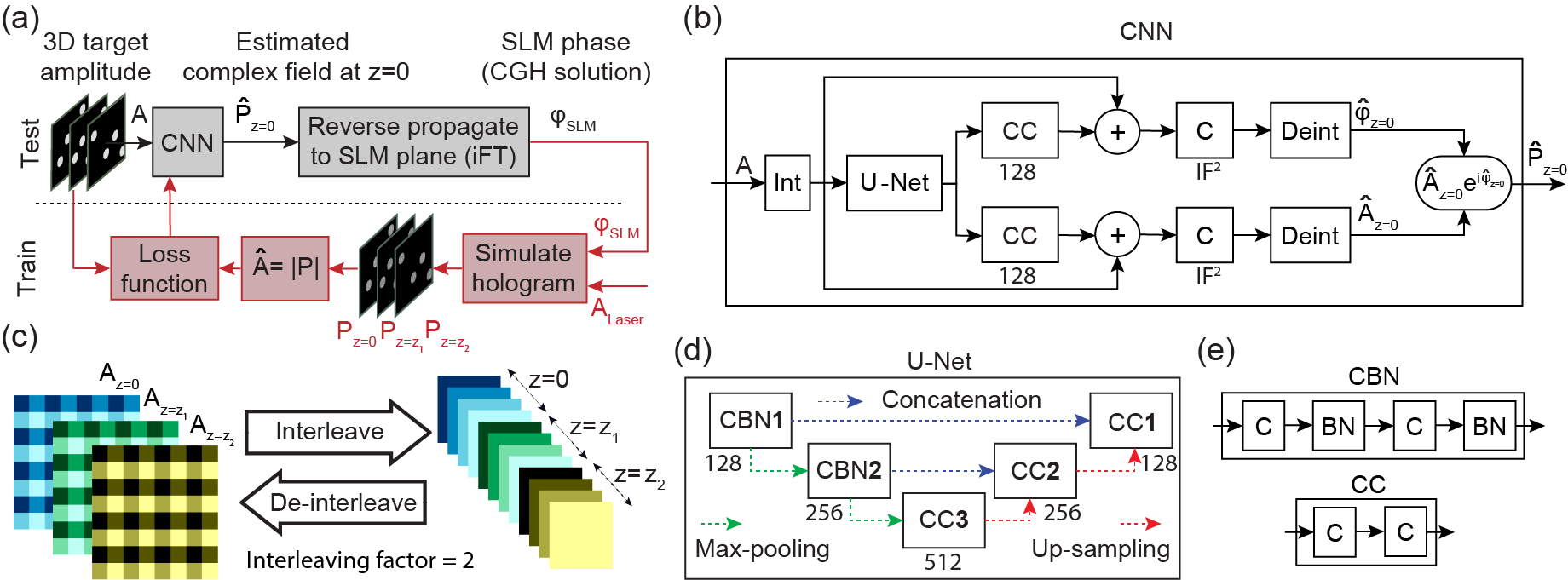
As can be seen on panel (d) the U-Net consists of three convolutional levels. The number of convolutional kernels at each levvel is determined by the n_kernels parameter. All the parameters are specified in a dictionary:
model = {
'path' : 'DeepCGH_Models/Disks',
'int_factor':16,
'n_kernels':[ 128, 256, 512],
'plane_distance':0.005,
'wavelength':1e-6,
'pixel_size':0.000015,
'input_name':'target',
'output_name':'phi_slm',
'lr' : 1e-3,
'batch_size' : 4,
'epochs' : 1,
'token' : '',
'shuffle' : 4,
'max_steps' : 100
}
Accordingly, the parameters of the model are described bellow:
'path': the path to save the checkpoints of the model as it is being trained.'int_factor': the interleaving factor. Refer to the manuscript for tips on determining the right values.'n_kernels': number of kernels for each convolutional level'plane_distance': the distance between depth planes. The planes are going to be equally placed around the focal point.'wavelength': wavelength of the laser to be use din the simulations'pixel_size': SLM pixel size'input_name': name to be used as input name in the model'output_name': name to be used for the output of the model'lr': the learning rate for training the model'batch_size': batch_size for training of the model'epochs': number of epochs to train the model for'token': customized token text to be used in the saved model file nameshuffle: the number of samples to be shuffled before being fed to the model (please refer to Tensorflow Data API for more details)'max_steps': maximum number of training steps.
Now that the parameters are set, you can create an instance of the DeepCGH_Datasets module. This module will create the training dataset. For this purpose first import the module:
from deepcgh import DeepCGH_Datasets
Next, you will feed the data dictionary to the module and instantiate a dataset:
dset = DeepCGH_Datasets(data)
If a dataset with the characteristics that you specified already exists, that will be printed in the console. Calling the getDataset method will generate the data and update the path to the dataset within the DeepCGH_Dataset object. If the dataset already exists a new dataset won't be generated but if the dataset doesn't exist (in the specified path) it'll be generated. A progress bar will display the progress of making the dataset.
Next, a DeepCGH module is instantiated according to the specified parameters:
dcgh = DeepCGH(data, model)
If the checkpoints for the model don't exist, the model will be trained from scratch when the train method is called. Otherwise, if the maximum number of epochs/steps is not reached the model will continue training. If the maximum steps/epochs is reached the model will be loaded and the multi-threaded tf.Estimator will be ready for real-time operation.
The CGH solution is achieved by calling the get_hologram method:
dcgh.get_hologram(data)
Coming soon (how to change the model structure, how to change the loss function, etc).
[1] M. Hossein Eybposh, Nicholas W. Caira, Mathew Atisa, Praneeth Chakravarthula, and Nicolas C. Pégard, "DeepCGH: 3D computer-generated holography using deep learning," Opt. Express 28, 26636-26650 (2020)