No method matching operation(::Sym{Real, Nothing}) error during index reduction #998
Description
Hi!
I have the following model (not sure if it is an error but I have gotten similar models to work using DifferentialEquations.jl (bare bones) ):
using ModelingToolkit
using DiffEqBase
using DifferentialEquations
function SimpleCircuitModel(tspan = (0.0, 1.0))
pars = ModelingToolkit.@parameters((f, A, C, R1, L, R2, t))
vars = ModelingToolkit.@variables((u2(t), i2(t), u4, u3, i1, u, u1, i))
der = Differential(t)
eqs = [
der(u2) ~ i1 * (C^-1),
der(i2) ~ u4 * (L^-1),
0 ~ u - (u4 + u3),
0 ~ u3 - R2 * i2,
0 ~ u1 - R1 * i1,
0 ~ u - A * sin(((2.0 * 3.1415) * f) * t),
0 ~ u - (u1 + u2),
0 ~ i - (i2 + i1),
]
nonLinearSystem = ModelingToolkit.ODESystem(
eqs,
t,
vars,
pars,
name = :($(Symbol("SimpleCircuit"))),
)
params = Dict(
f => 1.0,
A => 12.0,
C => 1.0,
R1 => 10.0,
L => 0.01,
R2 => 100.0,
t => tspan[1],
)
initialValues = [
u4 => 0.007,
u3 => 0.0,
i1 => 0.0,
u => 0.0,
u1 => 0.0,
i => 0.0,
u2 => 0.0,
i2 => 0.0,
]
firstOrderSystem = ModelingToolkit.ode_order_lowering(nonLinearSystem)
reducedSystem = ModelingToolkit.dae_index_lowering(firstOrderSystem)
problem = ModelingToolkit.ODEProblem(reducedSystem , initialValues, tspan, params)
return problem
end
function SimpleCircuitSimulate(tspan = (0.0, 10.0))
problem = SimpleCircuitModel(tspan)
return solve(problem, Tsit5())
end
SimpleCircuitSimulate()
Currently running this results in the following error:
julia> @time include("SimpleCircuit.jl")
ERROR: LoadError: MethodError: no method matching operation(::Sym{Real, Nothing})
Closest candidates are:
operation(::Term) at C:\Users\John\.julia\packages\SymbolicUtils\9iQGH\src\types.jl:338
operation(::SymbolicUtils.Add) at C:\Users\John\.julia\packages\SymbolicUtils\9iQGH\src\types.jl:600
operation(::SymbolicUtils.Mul) at C:\Users\John\.julia\packages\SymbolicUtils\9iQGH\src\types.jl:743
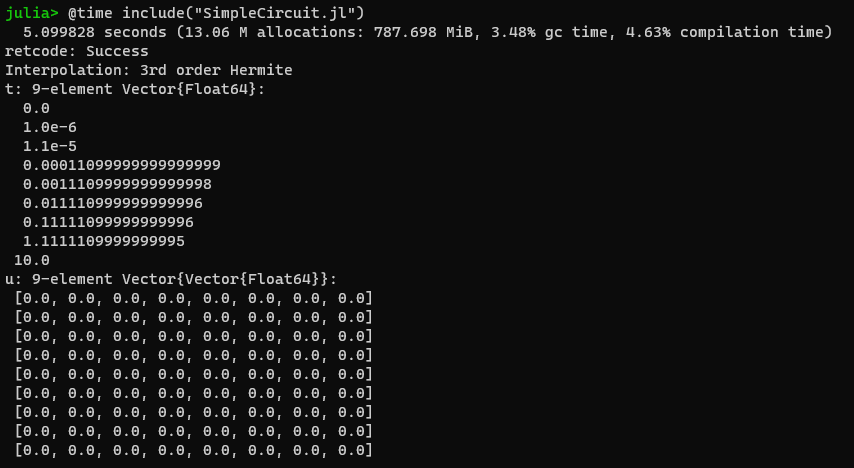
If I make a small change that is,
firstOrderSystem = ModelingToolkit.ode_order_lowering(nonLinearSystem)
# reducedSystem = ModelingToolkit.dae_index_lowering(firstOrderSystem)
problem = ModelingToolkit.ODEProblem(firstOrderSystem, initialValues, tspan, params)
return problem
It seems that I am able to generate the problem, however the simulation results are wrong
Edit:
Another model with a similar problem:
using ModelingToolkit
using DiffEqBase
using DifferentialEquations
function SimpleMechanicalSystemModel(tspan = (0.0, 1.0))
pars = ModelingToolkit.@parameters((C, J2, J1, t))
vars = ModelingToolkit.@variables((
omega_1(t),
Phi_1(t),
Phi_2(t),
omega_2(t),
tau_3,
tau_1,
tau_2,
u,
))
der = Differential(t)
eqs = [
der(omega_1) ~ (J1^-1) * (tau_1 + tau_2),
der(Phi_1) ~ omega_1,
der(Phi_2) ~ omega_2,
der(omega_2) ~ tau_3 * (J2^-1),
0 ~ tau_3 - -tau_2,
0 ~ tau_1 - u,
0 ~ tau_2 - C * (Phi_2 - Phi_1),
0 ~ u - t,
]
nonLinearSystem = ModelingToolkit.ODESystem(
eqs,
t,
vars,
pars,
name = :($(Symbol("SimpleMechanicalSystem"))),
)
pars = Dict(C => 1.0, J2 => 1.0, J1 => 1.0, t => tspan[1])
initialValues = [
tau_3 => 0.0,
tau_1 => 0.0,
tau_2 => 0.0,
u => 0.0,
omega_1 => 0.0,
Phi_1 => 0.0,
Phi_2 => 0.0,
omega_2 => 0.0,
]
firstOrderSystem = ModelingToolkit.ode_order_lowering(nonLinearSystem)
reducedSystem = ModelingToolkit.dae_index_lowering(firstOrderSystem)
problem = ModelingToolkit.ODEProblem(reducedSystem, initialValues, tspan, pars)
return problem
end
function SimpleMechanicalSystemSimulate(tspan = (0.0, 1.0))
problem = SimpleMechanicalSystemModel(tspan)
return solve(problem, Rodas5())
end
Cheers,
John