{kind=link}
{kind=link}
Algorithms to allow a robot to find a path from a source to a destination in a region that contains pre-defined obstacles.
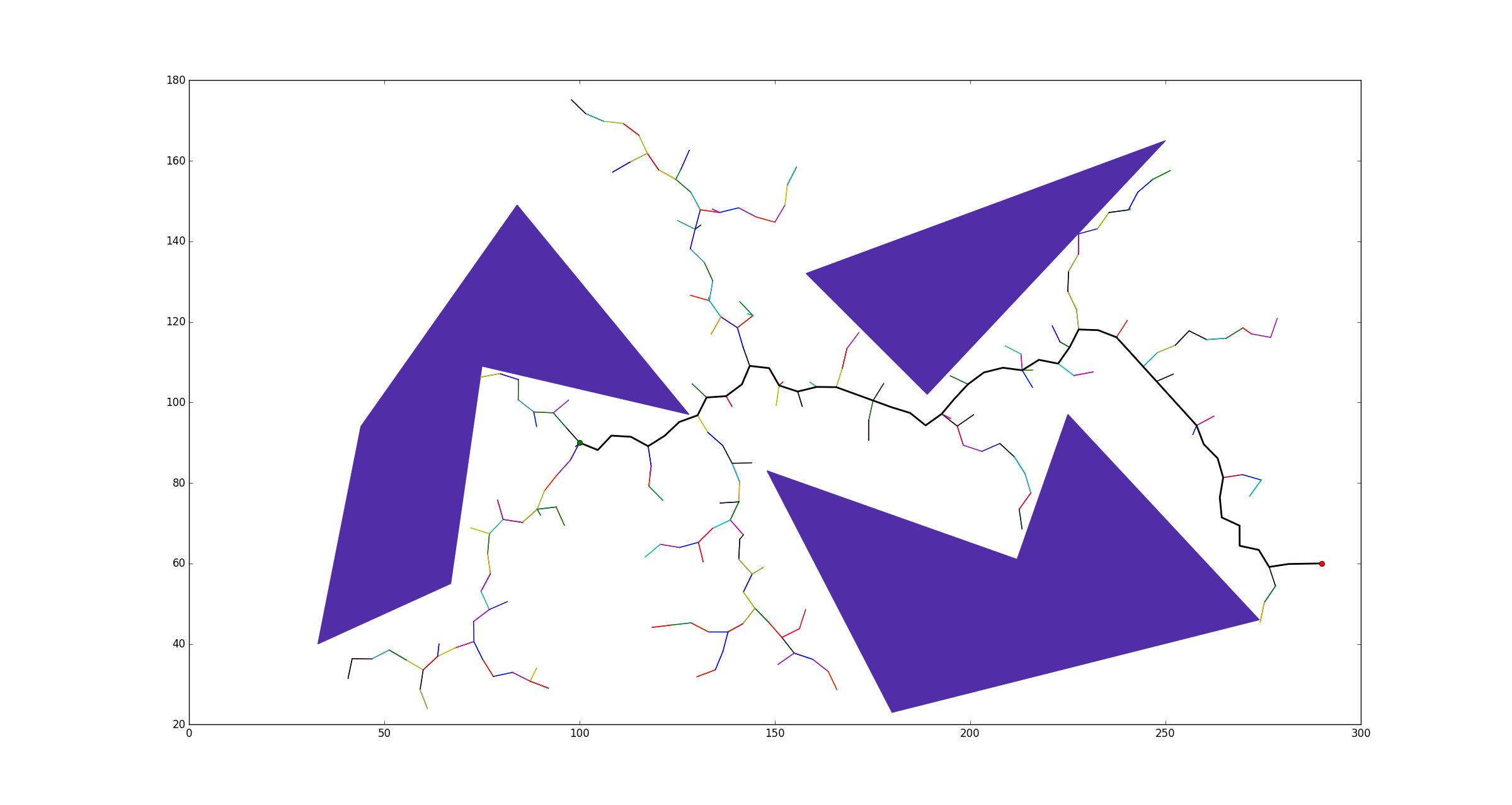
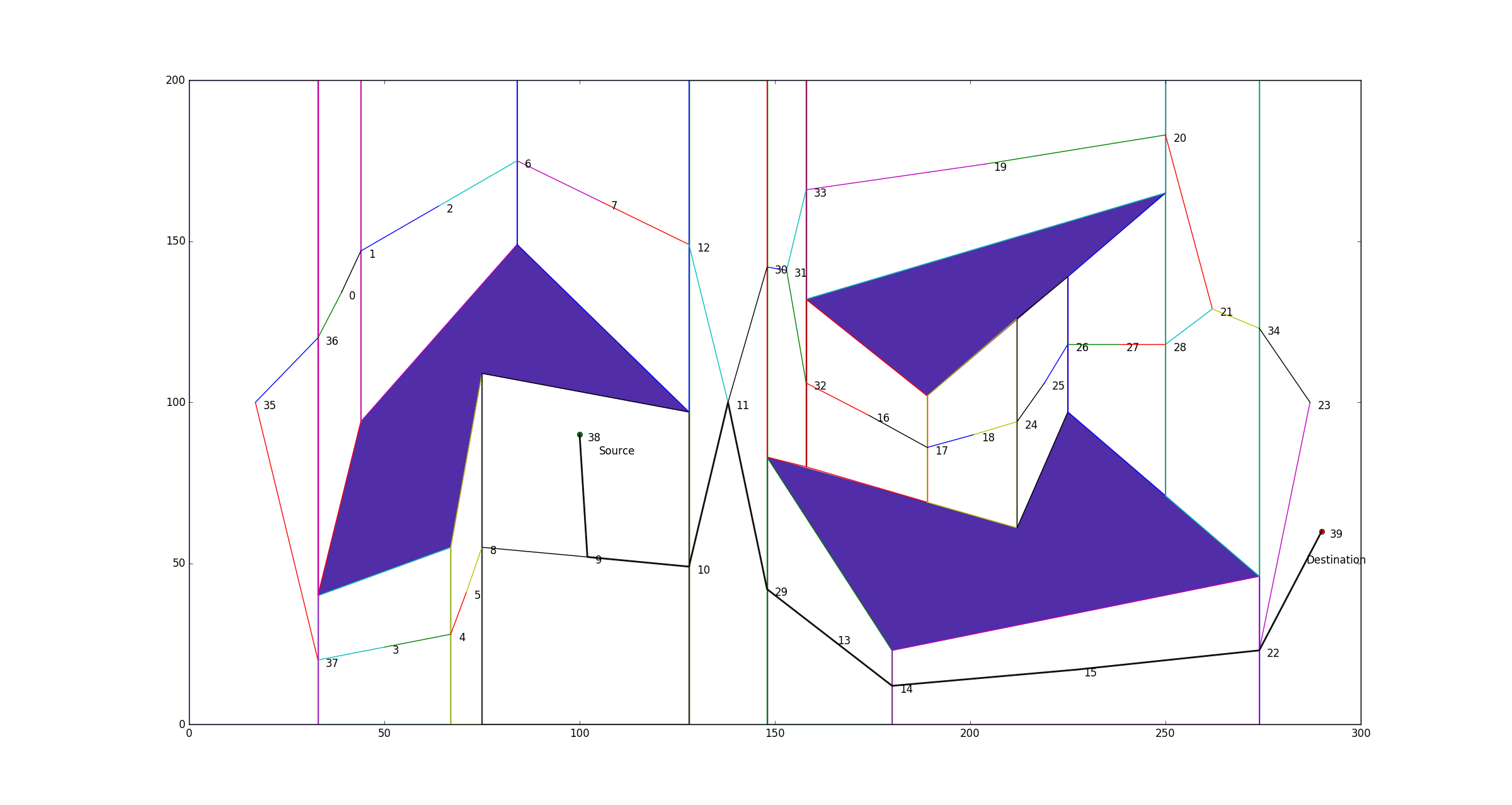
Two algorithms are implemented - Randomly Exploring Random Forest (RRT) and Vertical Cell Decomposition.
There are two implementations of RRT - Both use a goal bias of 0.05 and step size of 5.
RRT Result
Vertical Cell Decomposition Result
The helpers folder contains two files - geometry and graph - with helper functions
rrt.py tries to reach the goal after every new vertex is added, and therefore reaches the goal quicker.
rrt_naiive.py keeps expanding the tree till the goal is actually expanded.
The input file format are as follows Each line contains end points for a polygon describing an obstacle. The end points are arranged in a counter-clockwise direction.
The final line contains two points - source, and destination.