"Lidar, son yılların en dikkat çeken teknolojilerinden olan otonom araçlarda sıkça kullanılanılan sensörlerden birisidir. Bulunduğu ortamın belirli bölgesine veya 360 derece olacak şekilde lazer ışınları göndererek uzaklık ölçümü yapılmasını sağlar."
"Bir bölgenin, bir odanın haritalanmasında veya yeterince veri toplanırsa yapay zeka modelleri eğitilerek nesnelerin tanınmasında kullanılabilir."
"Bu github reposunda python ile pointcloud şeklinde gelen lidar verilerinin işlenmesi üzerine çalışmalar yaparken karşılaştığım ve faydalı bulduğum bir kütüphaneyi sizlerle paylaşmak ve dökümantasyonda verilen küçük bir örneği sunmak istiyorum."
pip install open3dveya
pip install --user open3d "Kütüphane dökümantasyonunda bu şekilde pip ile kuulabildiği yazıyor fakat benim denemelerimde kütüphane düzgün bir şekilde kurulmadı. Ben kütüphanenin github reposunu indirip build ederek kurlumunu gerçekleştirdim. Aşağıdaki linkden adımları takip ederek aynı şekilde kurulumları yapabilirsiniz."
"Pointcloud verisindeki bir nesneyi ayırt etme. Kod bloklarının çıktılarını altlarına görsel olarak ekleyeceğim"
İlk adım olarak numpy ve open3d kütphanesini import etme
import open3d as o3d
import numpy as np Open3d kütüphanesinde test için sunulmuş pointcloud datasını içe aktarma
ply_point_cloud = o3d.data.PLYPointCloud()
pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
print(pcd)
print(np.asarray(pcd.points))
o3d.visualization.draw_geometries([pcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])
Veriyi daha kolay işlenebilir hale getirmek için noktaların homojen bir alt kümesini alma
downpcd = pcd.voxel_down_sample(voxel_size=0.05)
o3d.visualization.draw_geometries([downpcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])
Noktaların normal doğrularını çizdirme
downpcd.estimate_normals(
search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
o3d.visualization.draw_geometries([downpcd],
zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024],
point_show_normal=True)
Nesnenin nokta bulutundan kırpılması
demo_crop_data = o3d.data.DemoCropPointCloud()
pcd = o3d.io.read_point_cloud(demo_crop_data.point_cloud_path)
vol = o3d.visualization.read_selection_polygon_volume(demo_crop_data.cropped_json_path)
chair = vol.crop_point_cloud(pcd)
o3d.visualization.draw_geometries([chair],
zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])
Nesne üzerinde kalan noktaların ayırt edici olması için renklendirilmesi
chair.paint_uniform_color([1, 0.706, 0])
o3d.visualization.draw_geometries([chair],
zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])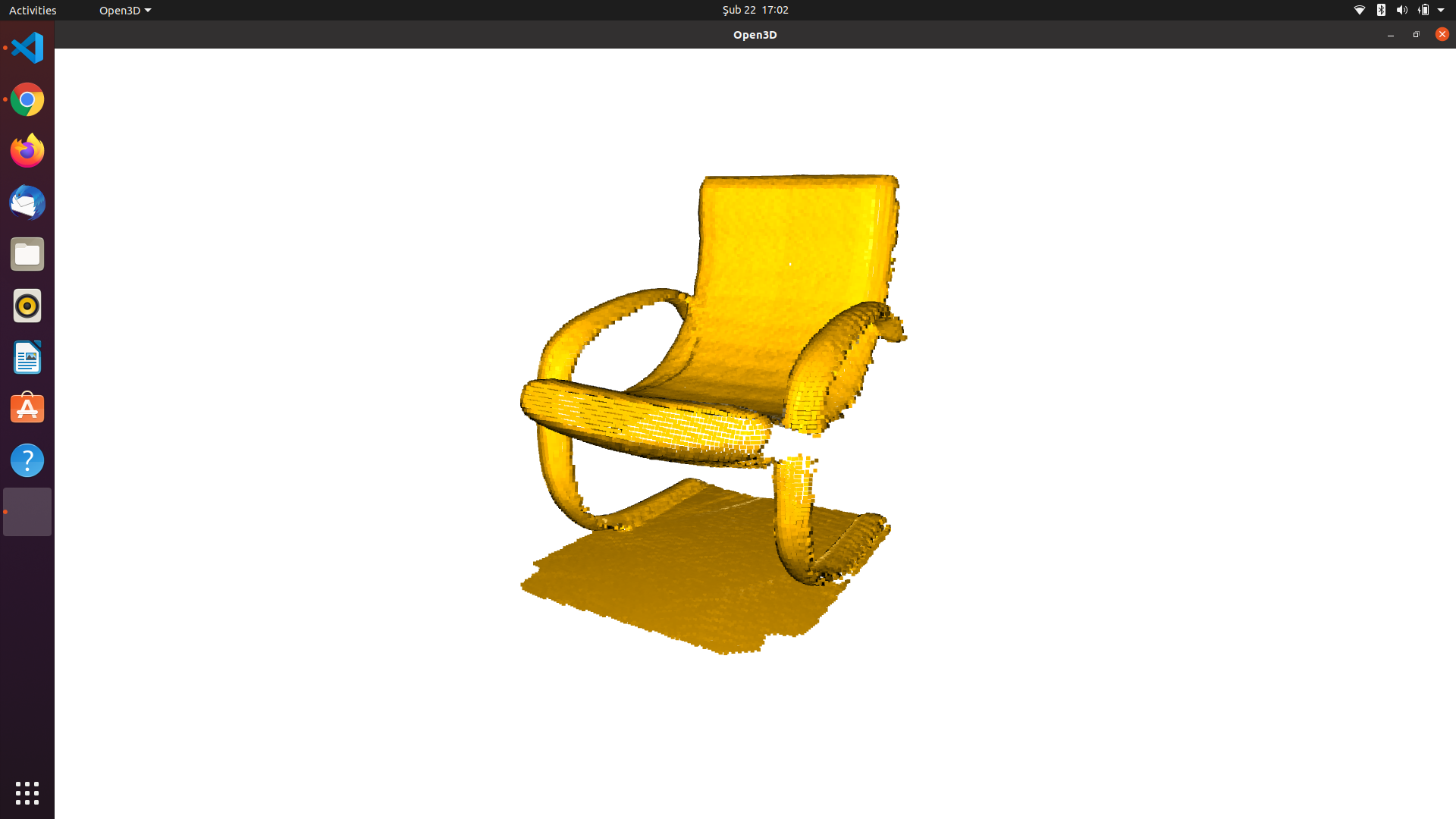
Nesnedeki noktaların uzaklıklarını bulma
dists = pcd.compute_point_cloud_distance(chair)
dists = np.asarray(dists)
ind = np.where(dists > 0.01)[0]Nesnenin sınırlarının iki eksenli boundingbox içerisine alınması
aabb = chair.get_axis_aligned_bounding_box()
aabb.color = (1, 0, 0)
obb = chair.get_oriented_bounding_box()
obb.color = (0, 1, 0)
o3d.visualization.draw_geometries([chair, aabb, obb],
zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])
Nesnenin noktalarını barındıran en küçük dışbükey yüzeyi tepit etme
pcl = chair
hull, _ = pcl.compute_convex_hull()
hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
hull_ls.paint_uniform_color((1, 0, 0))
o3d.visualization.draw_geometries([pcl, hull_ls])
"Merhaba ben YEC, umarım yardımcı olmuştur. Daha fazla incelemek için Open3d kütüphanesi dökümantasyonunu inceleyebilirsiniz. Linkedin hesabımdan takip edebilir ve konu ile ilgili sorularını sunabilirsiniz."