Eclipse ADORe is a modular software library and toolkit for decision making, planning, control and simulation of automated vehicles. ADORe provides:
- Algorithms and data models applied in real automated driving system for motion planning and control
- Mechanisms for safe interaction with other CAVs, infrastructure, traffic management, interactions with human-driven vehicles, bicyclists, pedestrians
- Integration with typical tools and formats such as ROS, SUMO, CARLA, OpenDrive, Road2Simulation, ITS-G5 V2X (MAPEM, SPATEM, DENM, MCM, SREM)
The ADORe library (libadore) is written in system-independent c++. For execution and application it is coupled with ROS (adore_if_ros). Building and execution occurs in docker containers.
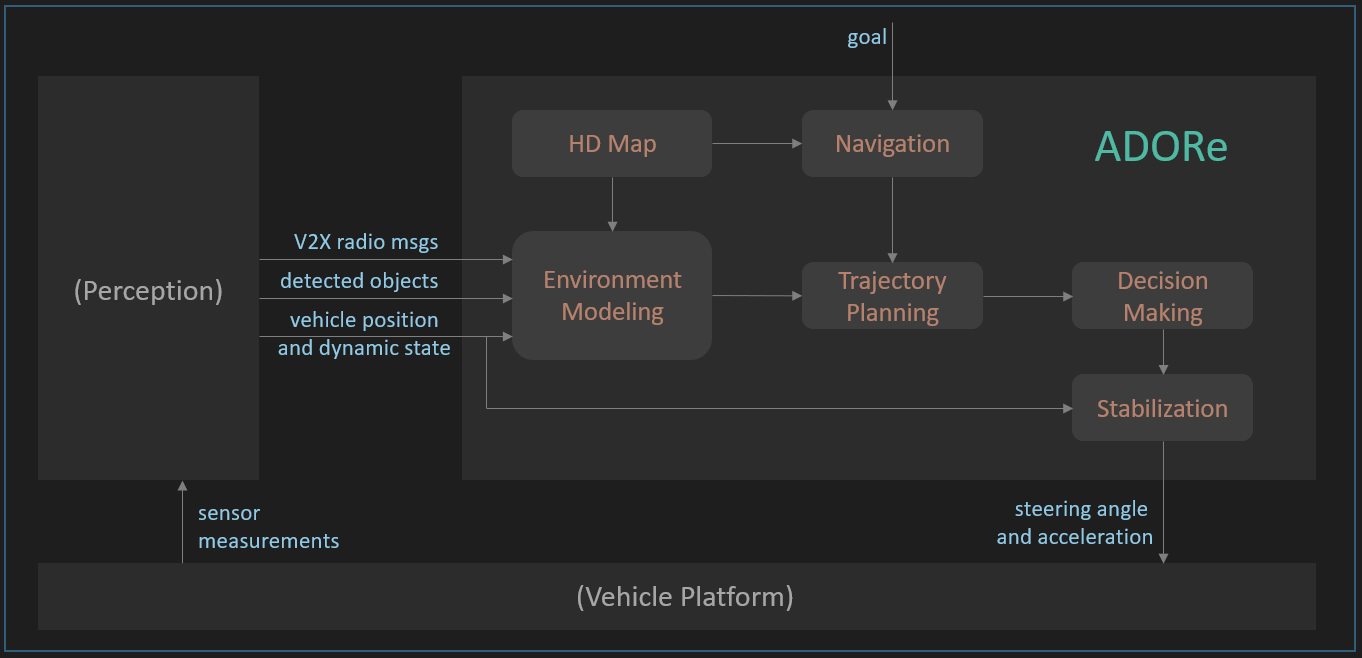
An ADORe control system works in concert with a perception stack (not provided) to control an autonomous vehicle platform.
Using V2X radio messages, a list of detected objects and ego vehicle position and velocity, the ADORe control system provides control inputs to a vehicle platform in order to steer it along a given high-definition roadmap to the desired goal location.
The following video shows an automated vehicle controlled by ADORe in an urban setting in Braunschweig, Germany:

In order to get started, it is advised to first check system requirements, follow the installation instruction and then try out the demo scenarios.