
Fast algorithms for generating voxel block meshes.
Two algorithms are included:
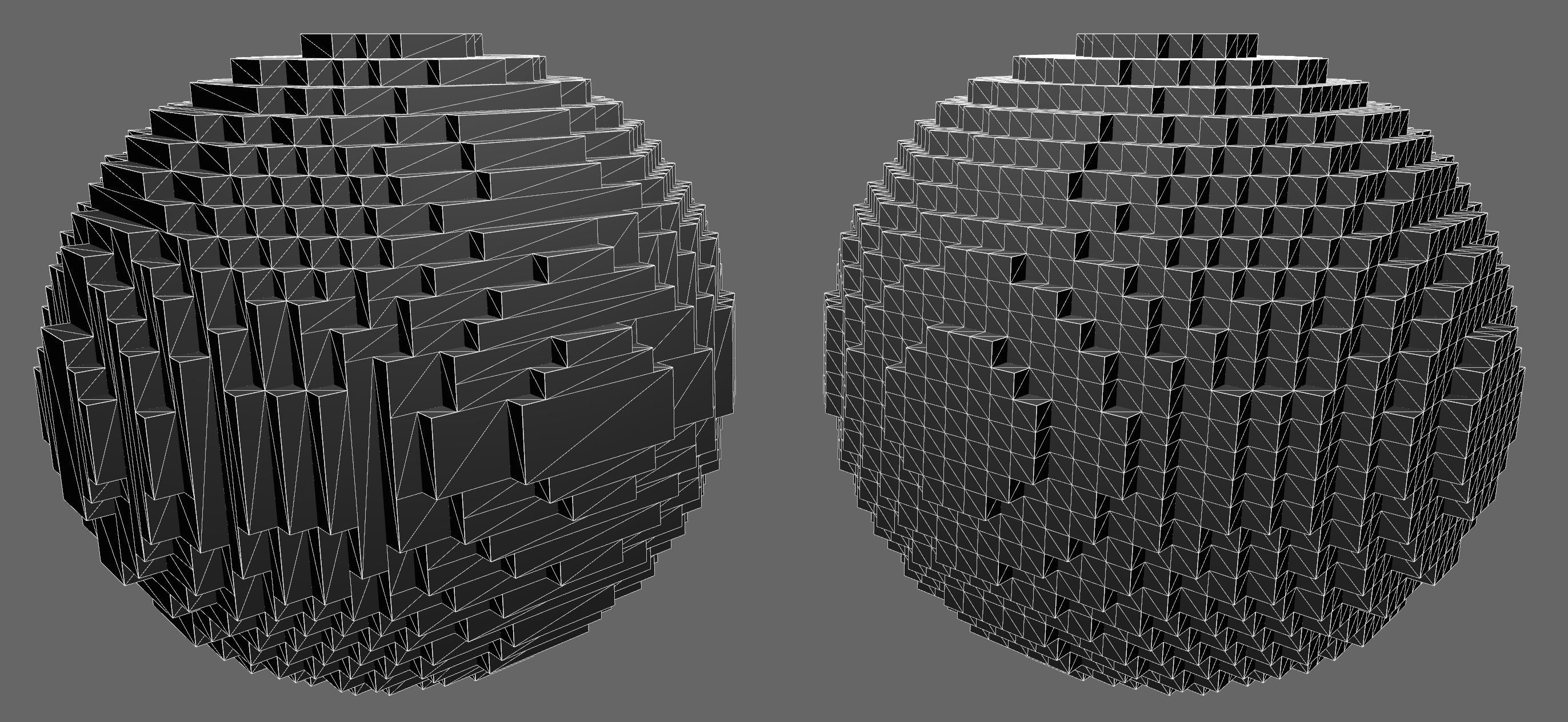
visible_block_faces: very fast but suboptimal meshesgreedy_quads: not quite as fast, but far fewer triangles are generated
Benchmarks show that visible_block_faces generates about 40 million quads per second on a
single core of a 2.5 GHz Intel Core i7. Assuming spherical input data, greedy_quads can generate a
more optimal version of the same mesh with 1/3 of the quads, but it takes about 3 times longer. To run the benchmarks
yourself, cd bench/ && cargo bench.
use block_mesh::ndshape::{ConstShape, ConstShape3u32};
use block_mesh::{greedy_quads, GreedyQuadsBuffer, MergeVoxel, Voxel, VoxelVisibility, RIGHT_HANDED_Y_UP_CONFIG};
#[derive(Clone, Copy, Eq, PartialEq)]
struct BoolVoxel(bool);
const EMPTY: BoolVoxel = BoolVoxel(false);
const FULL: BoolVoxel = BoolVoxel(true);
impl Voxel for BoolVoxel {
fn get_visibility(&self) -> VoxelVisibility {
if *self == EMPTY {
VoxelVisibility::Empty
} else {
VoxelVisibility::Opaque
}
}
}
impl MergeVoxel for BoolVoxel {
type MergeValue = Self;
type MergeValueFacingNeighbour = Self;
fn merge_value(&self) -> Self::MergeValue {
*self
}
fn merge_value_facing_neighbour(&self) -> Self::MergeValueFacingNeighbour {
*self
}
}
// A 16^3 chunk with 1-voxel boundary padding.
type ChunkShape = ConstShape3u32<18, 18, 18>;
// This chunk will cover just a single octant of a sphere SDF (radius 15).
let mut voxels = [EMPTY; ChunkShape::SIZE as usize];
for i in 0..ChunkShape::SIZE {
let [x, y, z] = ChunkShape::delinearize(i);
voxels[i as usize] = if ((x * x + y * y + z * z) as f32).sqrt() < 15.0 {
FULL
} else {
EMPTY
};
}
let mut buffer = GreedyQuadsBuffer::new(voxels.len());
greedy_quads(
&voxels,
&ChunkShape {},
[0; 3],
[17; 3],
&RIGHT_HANDED_Y_UP_CONFIG.faces,
&mut buffer
);
// Some quads were generated.
assert!(buffer.quads.num_quads() > 0);License: MIT OR Apache-2.0