{kind=link}
{kind=link}
{kind=link}
Recovering and building 3d meshes from ancient Mars Pathfinder and Sojourner 3d data
This data set consists of a set of tables. Each table contains 3-D object position information in the form of a Cartesian (x,y,z) coordinate in units of meters corresponding to each pixel in an IMP EDR stereo pair acquired in the 670 nm filter. The coordinates are deduced using an automated machine vision algorithm that correlates features between the left and right images of stereo pairs to determine their disparity (difference in image position between the left and right eye) then computes their 3-D object position taking into account the camera pointing and stereo optics. The computer algorithm is described by Stoker et al. STOKERETAL1999 and summarized below.
Stereo model products (and corresponding tables) have been produced for two IMP Pathfinder data sets acquired in stereo in the 670 nm filter. The IMP data sets are described by Gaddis et al. GADDISETAL1999. The stereo data sets that were analyzed are called the Monster Pan and the Super Pan:
The Monster Pan was a complete stereo panorama of the Pathfinder landing site acquired early in the mission (sols 3-6). The monster pan images in the 670 nm filter were compressed using lossy JPEG compression (6:1 compression factor) and the image to image overlap in the panoramic product was relatively low.
(B/W panorama?)
The Super Pan was designed to produce a full panorama of the landing site with low compression ratio in all 15 narrow-band filters and the 670 nm stereo filter set was losslessly compressed using Rice compression. It was designed with increased frame-to-frame overlap relative to the Monster Pan to assist with automated matching between images and insure gap-free stereo coverage.
The Super Panrepresented a large data volume and was acquired over an 8 week period from sols 13 to 80. It was 83% complete when the mission ended. While incomplete, the 3-D reconstructions from the Super Pan images are somewhat better than for the Monster Pan due to the increased image overlap and lower image compression.
As discussed above, the 3-D position information is deduced matching brightness patterns in the left and right eyes of the stereo pair. When no match is found, or inconsistent matches found in the correlation and cross correlation, no disparity is calculated and a value of zero is assigned to the Cartesian coordinate (X=Y=Z=0) in the table. Thus, zero values in the table indicate that the stereo matching algorithm did not yield a good solution at that location.
- texture: iTTTTTTTTTl.img_SSSSIIIIII0T
- i: data type = image (b=billboard, t=terrain)
- TTTTTTTTT timestamp (time of capture in seconds) (9 characetrs)
- l: L = Left image, R = right, P = ???
- .img: data type: image
- _: separator
- SSSS: sequence number (4 characters)
- IIIIII: image number in sequence (6 character)
- 0: ???
- T: texture (_3D = 3d WRL file)
Examples:
- Textures (rgb): i1246924501p.img_0070060390T.rgb.bz2.gz : iTTTTTTTTTp.img_SSSSIIIIIIT.rgb
- 3d terrain (.wrl): t1246924501p.img_0070060390_3.wrl.bz2
- billboards (.wrl): b1246925872p.img_0070065390.wrl.bz2.gz
- texture: i9TTTTTX.jpg (X= A, C, E or T)
- i = image file
- 9 = constant
- TTTTT = last 5 characters of timestamp
- T = grayscale based on filter #5
- C = color, retouched, not suitable for photogrammetry
- E = Enhanced color (artistic)
- A = altitude by color overlayed to b/w texture
- 3d terrain: t9TTTTTX.wrl
- i = terrain 3d file
- 9 = constant
- TTTTT = last 5 characters of timestamp
- X:
- A = 10000 polygons per file, 1000000 polygons for whole scene
- B = 5000 polygons per file, 485000 polygons for whole scene
- C = 1000 polygons per file, 97000 polygons for whole scene
- D = 500 polygons per file, 48500 polygons for whole scene
- There are 388 terrain files, one per stereo image pair in four resolutions
- billboards: b9TTTTTX.wrl
- b = billboard 3d file
- 9 = constant
- TTTTT = last 5 characters of timestamp
- X:
- Number of polygons per file, always "Z" for billboards (=2 polygons)
Original textures created by SGI were saved in RGB format (created by SGI itself), available here (13 MB); JPG versions are available online, but this script needs PPM format.
How to convert texture to uncompressed PPM using IrfanView:


-
Interactive map of available DEMs/DTMs: https://www.uahirise.org/hiwish/maps/dtms.jsp (look for -33.5, 19.28 shown in bottom right corner)
-
Interactive map of visible Hirise images, centered on landing site (19.28°N and 326.5°E): http://global-data.mars.asu.edu/bin/hirise.pl?res=32&clat=19.28&clon=326.5&ids=PSP_002391_1995_COLOR&day_night=2&rel=0
-
MPF landing site coordinates: 19.28°N and 326.5°E
-
Source hirise images (see also HiVew viewer):
- PSP_001890_1995:
- Main page
- Online viewer
- Lo-res folder
- Raw/hires folder
- DEM folder (browse version) (no DEM available as of 2022/08/04)
- DEM folder (raw data) (no DEM available as of 2022/08/04)
- Link for Hiview viewer
- PSP_002391_1995:
- ESP_022038_1995:
- Main page
- Online viewer
- Lo-res folder
- Raw/hires folder
- DEM folder (browse version) (not available as of 2022/08/04)
- DEM folder (raw data) (not available as of 2022/08/04)
- Link for Hiview viewer
- PSP_001890_1995:
{kind=link}
{kind=link}
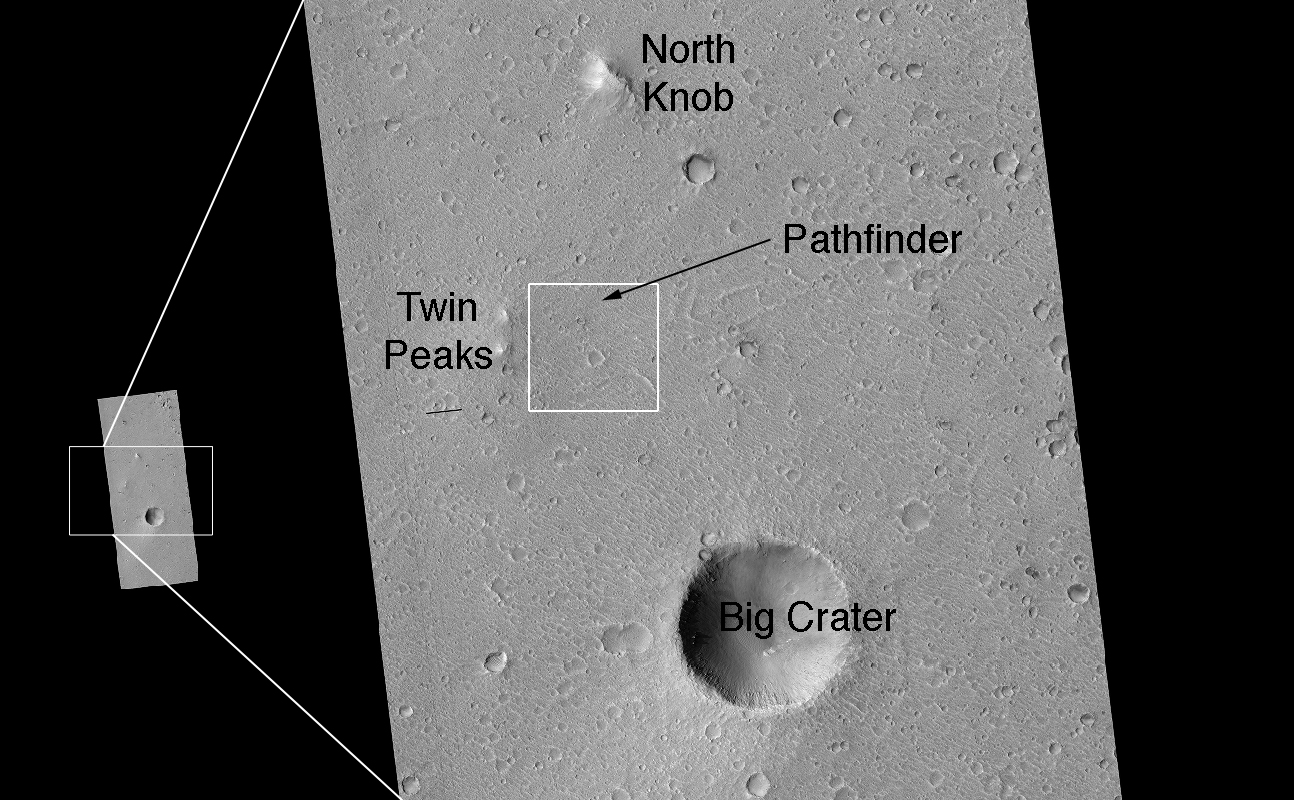
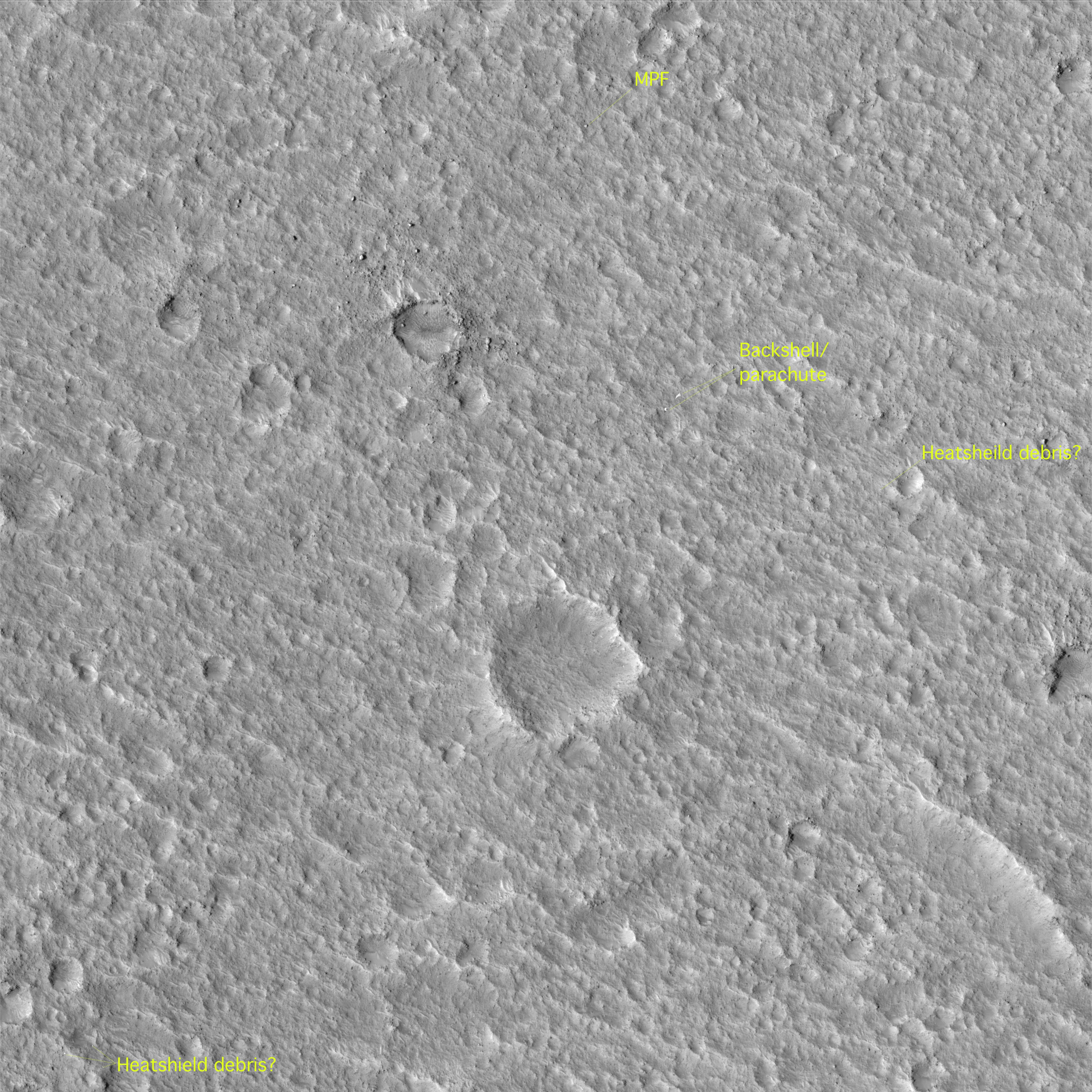
Pathfinder location:

Extracting two images of same size from above resources, one for visible image and one for depthmap, it should be possible viewing the 3d model in inerative way in these pages:
- My collection of data and links on MPF mission
- zbinden mirror for WRL and textures (broken)
- schwehr mirror for WRL and textures
- July 4th, 1997: Successful landing announce
- Mars Pathfinder ASI/MET Archive CD-ROM at atmos.nmsu.edu
- Original NASA page with VRML models (broken links to SGI.com)
- Folders list at pdsimage2.wr.usgs.gov:
- mpim_0001/ - 09-Jan-2009 17:41 - SCLK: 1229455934 - 1247913223
- mpim_0002/ - 09-Jan-2009 19:12 - SCLK: 1247913268 - 1249772261
- mpim_0003/ - 09-Jan-2009 19:19 - SCLK: 1249772268 - 1254046834
- mprv_0001/ - 02-Feb-2009 23:31
- Mars Pathfinder radioscience at pds-geosciences.wustl.edu
- Raw 3d data in .TAB format:
- Images taken by rover, on pdsimage2.wr.usgs.gov
- Images taken by rover, on NASA PDS atlas
- Images taken by rover, grouped by sol; table with thumbnails
- Clickable map with rover images
- https://mars.nasa.gov/MPF/index1.html
- Digitec mirror of NASA site (anyway broken links to sgi.com vrml models
{kind=link}
- (0) USGS MAPPING OF THE MARS PATHFINDER LANDING SITE: PROGRESS AND PLANS
- Randolph L. Kirk (rkirk AT flagmail.wr.usgs.gov)
- (1) The Imager for Mars Pathfinder Experiment
- JGR—Planets, 102, 4003–4025
- Smith, P., et al.
- 1997
- (2) Results from the Mars Pathfinder Camera
- Science, 278, 1758–1765
- Smith, P., et al.
- 1997
- (3) USGS Experiences Mapping the Mars Pathfinder Landing Site
- ISPRS Working Group IV/5 workshop “Mapping of Mars”, University College London, 16-17 April 1999
- Kirk, R. L., et al.
- 1998
- abstract online at http://www/ps.ucl.ac.uk/isprs-etm/abstracts/kirk.html;
- (3a) Mapping the Sagan Memorial Station Site with the Imager for Mars Pathfinder Camera
- In Lunar Planet Sci. XXIX, abstract #1752 (CD-ROM)
- Kirk, R. L., et al.
- 1998
- (3b) The Mars Pathfinder “Super Pan”: A U.S.G.S. Cartographic Product
- In Lunar Planet. Sci. XXIX, abstract #1831 (CD-ROM)
- Gaddis, L., et al., 1998
- (4) Digital Mapping of the Mars Pathfinder Landing Site: Design, Acquisition, and Compilation of a Cartographic Product for Science Applications
- J. Geophys Res., 104 (E4), 8853–8868
- Gaddis, L., et al.
- 1999
- (5) Digital Photogrammetric Analysis of the IMP Camera Images: Mapping the Pathfinder Landing Site in Three Dimensions
- J. Geophys. Res., 104 (E4), 8869–8888
- Kirk, R. L., et al.
- 1999
- (6) “Super Resolution” of the Mars Pathfinder Landing Site by Manual Techniques
- In Lunar Planet. Sci. XXIX, abstract #1965 (CD-ROM)
- Parker, T. J.
- 1998
Others:
- HIGH PRECISION LANDING SITE MAPPING AND ROVER LOCALIZATION BY INTEGRATED BUNDLE ADJUSTMENT OF MPF SURFACE IMAGES
- Kaichang Di (di.2 AT osu.edu) , Fengliang Xu (xu.101 AT @osu.edu) , Ron Li (li.282 AT osu.edu), Larry H. Matthies ( - lhm AT telerobotics.jpl.nasa.gov ), Clark F. Olson (cfolson AT u.washington.edu )
- AN IMAGE MAP OF THE MARS PATHFINDER LANDING SITE
- M. Kuschel, J. Oberst (Juergen.Oberst AT dlr.de)
MPF USGS papers list: https://astrogeology.usgs.gov/search/results?k1=mission&v1=Mars+Pathfinder