CV Aid is a set of helpers of computer vision tasks.
pip install cv-aid
git clone https://github.com/khalidelboray/cv-aid
cd cv-aid
poetry install
poetry run python setup.py installpoetry run test
all tests are in tests/ directory.
-
Basic Frame Functions
from cv_aid import Frame frame = Frame.load('/path/to/image.jpg') # or import cv2 frame = Frame(cv2.imread('/path/to/image.jpg')) # Grayscale image gray = frame.gray() # Resize image small = frame.resize(width=100, height=100) # Crop image cropped = frame.crop(x=100, y=100, width=100, height=100) # All methods return a new Frame object, so you can chain them new_frame = frame.resize(width=100, height=100).crop(x=100, y=100, width=100, height=100) # Save image frame.save('/path/to/image.jpg')
-
Basic Video Functions
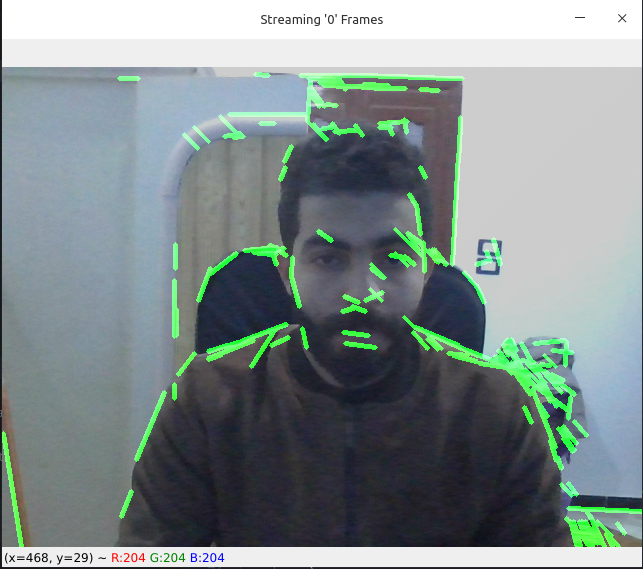
from cv_aid import VideoStream, Frame import cv2 import numpy as np def on_frame(frame: Frame) -> Frame: """ A function that is called when a frame is read from the video stream. :param frame: The frame that was read. :return: The frame that was read. """ orig = frame canny = frame.gray().canny(50, 100) line_image = Frame(np.copy(orig.frame) * 0) lines = cv2.HoughLinesP( canny.frame, 1, np.pi / 180, 50, np.array([]), minLineLength=10, maxLineGap=5 ) if lines is not None: for line in lines: line = line[0] line_image = line_image.line( (line[0], line[1]), (line[2], line[3]), (0, 255, 0), 3 ) lines_edges = cv2.addWeighted(orig.frame, 0.8, line_image.frame, 1, 1) return Frame(lines_edges) stream = VideoStream(src=0, on_frame=on_frame).start() stream.start_window()
Output Demo:
-
Haar Cascade Functions
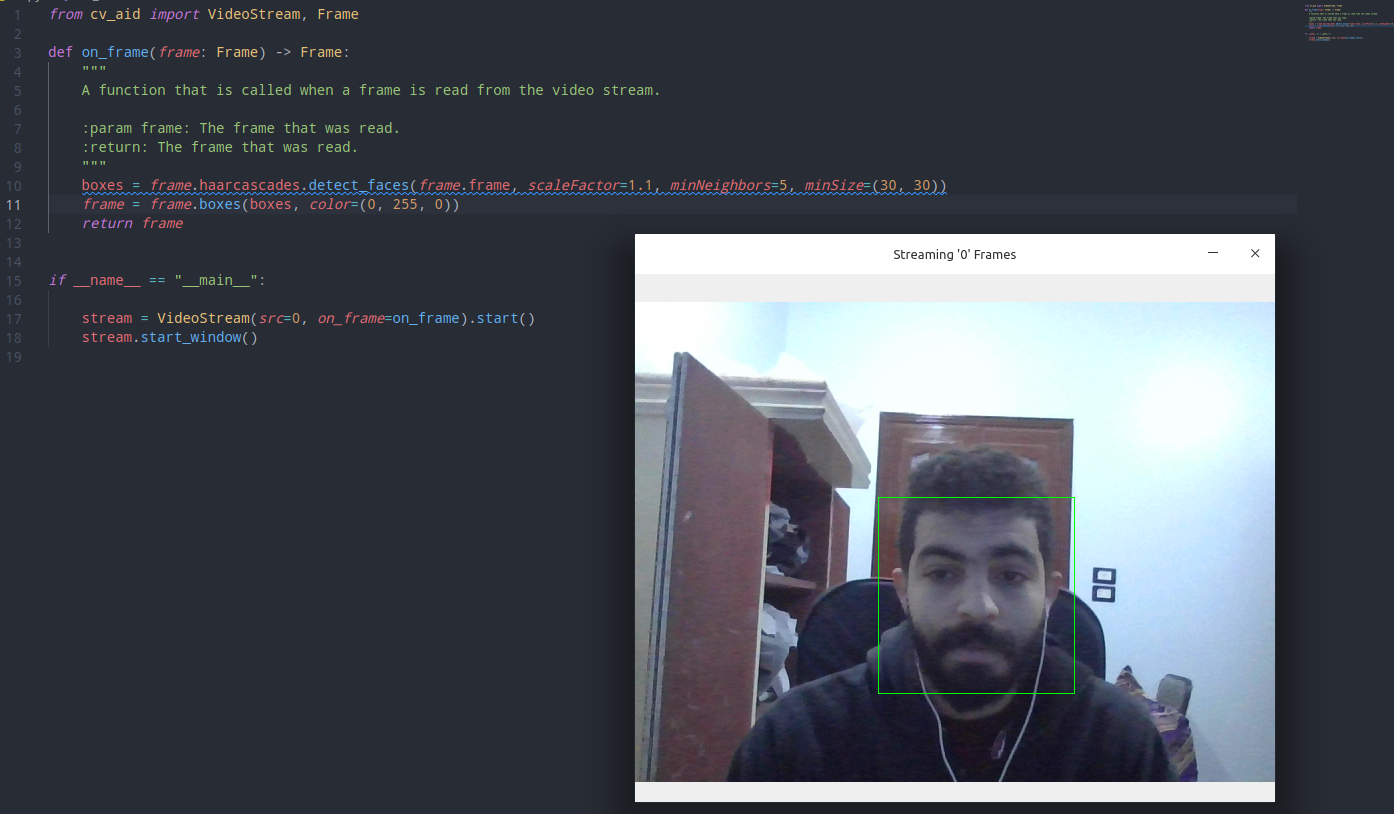
from cv_aid import VideoStream, Frame def on_frame(frame: Frame) -> Frame: """ A function that is called when a frame is read from the video stream. :param frame: The frame that was read. :return: The frame that was read. """ boxes = frame.haarcascades.detect_faces(frame.frame, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30)) frame = frame.boxes(boxes, color=(0, 255, 0)) return frame if __name__ == "__main__": stream = VideoStream(src=0, on_frame=on_frame).start() stream.start_window()
Output Demo:
-
Tourch Hub (Yolov5)
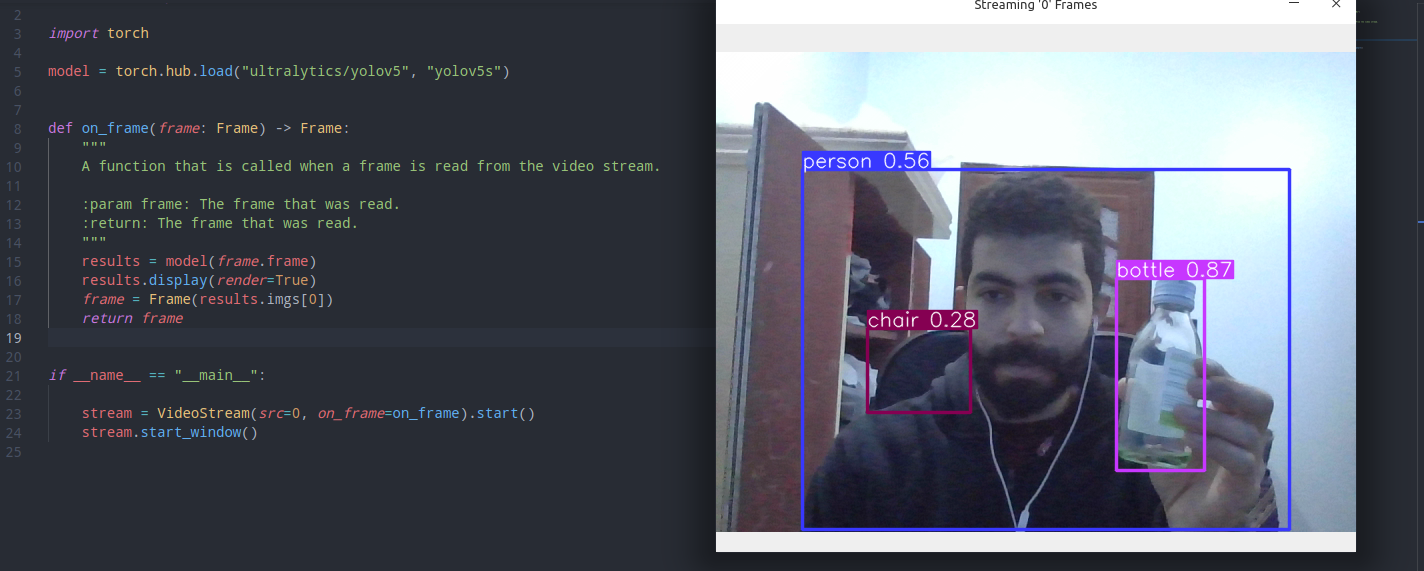
from cv_aid import VideoStream, Frame import torch model = torch.hub.load('ultralytics/yolov5', 'yolov5s') def on_frame(frame: Frame) -> Frame: """ A function that is called when a frame is read from the video stream. :param frame: The frame that was read. :return: The frame that was read. """ results = model(frame.frame) results.display(render=True) frame = Frame(results.imgs[0]) return frame if __name__ == "__main__": stream = VideoStream(src=0, on_frame=on_frame).start() stream.start_window()
-
Dlib (
Download model)from cv_aid._dlib import Dlib saved_model = Dlib.download_landmark_detector(path='/dir/to/download/model/at/') dlib = Dlib(landmark_predictor_path=saved_model) face_recognetion_model = Dlib.download_face_recognition_model_v1(path='/dir/to/download/model/at/')
-
Dlib (Face landmark)
Give it a try!# pylint: disable=C0103 import math import cv2 import numpy as np from skimage.draw import disk, polygon, set_color from cv_aid import Frame, VideoStream RIGHT_EYE_POINTS = list(range(36, 42)) LEFT_EYE_POINTS = list(range(42, 48)) def get_poly_data(desired, landmarks, shape): points = [] for i in desired: points.append((landmarks.part(i).x, landmarks.part(i).y)) points = np.array(points, dtype=np.int32) rr, cc = polygon(points[:, 1], points[:, 0], shape) return points, rr, cc def on_frame(frame: Frame) -> Frame: """ A function that is called when a frame is read from the video stream. :param frame: The frame that was read. :return: The frame that was read. """ faces = frame.dlib.detect_faces(frame.frame) for face in faces: face_landmarks = frame.dlib.detect_landmarks(frame.frame, face) left_eye, *_ = get_poly_data(LEFT_EYE_POINTS, face_landmarks, frame.shape) right_eye, *_ = get_poly_data(RIGHT_EYE_POINTS, face_landmarks, frame.shape) left_eye_center = left_eye.mean(axis=0).astype("int") right_eye_center = right_eye.mean(axis=0).astype("int") left_eye_radius = ( int( math.sqrt( (left_eye[3][0] - left_eye[0][0]) ** 2 + (left_eye[3][1] - left_eye[0][1]) ** 2 ) ) - 10 ) right_eye_radius = ( int( math.sqrt( (right_eye[3][0] - right_eye[0][0]) ** 2 + (right_eye[3][1] - right_eye[0][1]) ** 2 ) ) - 10 ) frame = ( # Glasses connection line frame.line( (left_eye_center[0] - left_eye_radius, left_eye_center[1]), (right_eye_center[0] + right_eye_radius, right_eye_center[1]), (0, 0, 0), 4, ) # Glasses circle 1 *Border* .circle( left_eye_center, left_eye_radius, (0, 0, 0), 4, ) # Glasses circle 1 .circle( left_eye_center, left_eye_radius, (0, 0, 255), 2, ) # Glasses circle 2 *Border* .circle( right_eye_center, right_eye_radius, (0, 0, 0), 4, ) # Glasses circle 2 .circle( right_eye_center, right_eye_radius, (0, 0, 255), 2, ) # Ears connection line 1 .line( (face_landmarks.part(0).x, face_landmarks.part(0).y), (right_eye_center[0] - right_eye_radius, right_eye_center[1]), (0, 0, 255), 2, ) # Ears connection line 1 .line( (face_landmarks.part(16).x, face_landmarks.part(16).y), (left_eye_center[0] + left_eye_radius, left_eye_center[1]), (0, 0, 255), 2, ) ) # Overlay the frame with the image of the glasses colored in transparent black overlay = frame.frame.copy() alpha = 0.5 # Get first circle rows and columns (pixel coordinates) rr, cc = disk(right_eye_center[::-1], right_eye_radius) # Set the color of the circle set_color(overlay, (rr, cc), (0, 0, 0)) # Get second circle rows and columns (pixel coordinates) rr, cc = disk(left_eye_center[::-1], left_eye_radius) # Set the color of the circle set_color(overlay, (rr, cc), (0, 0, 0)) # Overlay the image with the overlay image frame.frame = cv2.addWeighted(overlay, alpha, frame.frame, 1 - alpha, 0) return frame if __name__ == "__main__": stream = VideoStream(src=0, on_frame=on_frame).start() stream.start_window()