⭐️ Course Contents ⭐️
⌨️ (0:00:00) course introduction
⌨️ (0:02:23) graph basics
⌨️ (0:07:10) depth first and breadth first traversal
⌨️ (0:29:13) has path
⌨️ (0:42:11) undirected path
⌨️ (1:00:44) connected components count
⌨️ (1:13:29) largest component
⌨️ (1:24:03) shortest path
⌨️ (1:39:36) island count
⌨️ (1:58:52) minimum island
⌨️ (2:12:05) outro
- Graphs = Nodes+Edges

- Type of Graphs

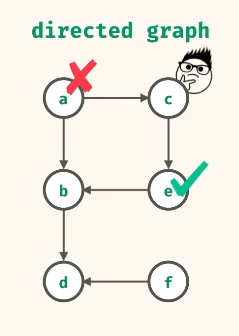
In directed graphs, we have to obey the directions of the arrowheads, ie., If we move from A to C, we can only head to E and not back to A.
- Terminologies
Any node accessible through an edge is called Neighbour node.

- Representing a Graph Data Structure
We would use a hashmap/dictionary to represent graphs as an adjacency list

In this key-value pair, we have the neighbours associated with each node as a key.
- Doing Traversal - Depth First and Breadth First
- Depth First Traversal
We start from a node A and move deep through the nodes till we read deadend. ie., A -> B -> D
Now we move to C. ie., A -> C -> E -> B -> D
We can see some double traversal as well.
- Breadth First Traversal
We start from Node A and move to B, then A move to C

NOTE: DFT is unidirectional and runs till endpoint is reached before switching directions. BFT is uniform traversal and it runs evenly spread out from the starting node.
❓ Implementing in code

DFT - Steps [STACK]
- We start with A and check its neighbours - C, B; We push C and then B to the stack; Print A
- Now we pop the stack, we use B as the Current node and check its neighbours - D; Push D to the Stack ; Print B
- Now we pop stack, we use D as the Current node and check its neighbours - F; Push F to the stack; Print D
- Pop the stack, F has no neighbours; Print F
- We have C in the stack, we use C and get its neighbours - E; Push E to stack; Print C
- Pop the stack finally, we have just E left; Print E.

BFT - Steps [QUEUE]
- Start with A, Push A to Queue; pop the Queue, A is the Current node; Print A
- Push B and then C to the Queue, if we want to travel to B first then C; Queue has B and then C in it; pop the queue; B is the Current node; Check the neighbours of B - we have D; Print B
- In the queue - C and then D; Pop the queue; C is the Current node; C has the neighbours - E; Push it to back of Queue; Print C
- In the queue - D and then E; Pop the queue; D is the Current node; D has neighbours - F; Push it to back if the Queue; Print D
- In the queue - E and then F; Pop the queue; E is the Current node; E and F both have no neighbours so we print E and then F

Write a function, hasPath, that takes in an object representing the adjacency list of a directed acyclic graph and two nodes (src, dst). The function should return a boolean indicating whether or not there exists a directed path between the source and destination nodes.
NOTE:
Cyclic vs Acyclic graph - If I start with a node and end up back in it, its cyclic else its not.
Test cases -
# Test case 1
const graph = {
f: ['g', 'i'],
g: ['h'],
h: [],
i: ['g', 'k'],
j: ['i'],
k: []
};
hasPath(graph, 'f', 'k'); // true
# Test Case 2
const graph = {
f: ['g', 'i'],
g: ['h'],
h: [],
i: ['g', 'k'],
j: ['i'],
k: []
};
hasPath(graph, 'f', 'j'); // false
Test Case 1 Image:

Write a function, undirectedPath, that takes in an array of edges for an undirected graph and two nodes (nodeA, nodeB). The function should return a boolean indicating whether or not there exists a path between nodeA and nodeB.
Test Cases
# test case 1
const edges = [
['i', 'j'],
['k', 'i'],
['m', 'k'],
['k', 'l'],
['o', 'n']
];
undirectedPath(edges, 'j', 'm'); // -> true
# test case 2
const edges = [
['i', 'j'],
['k', 'i'],
['m', 'k'],
['k', 'l'],
['o', 'n']
];
undirectedPath(edges, 'k', 'o'); // -> false