This projects is related to the YMFC from Youtube.

TODO Add image of multicopter
| BACK | ||
|---|---|---|
| RIGHT | 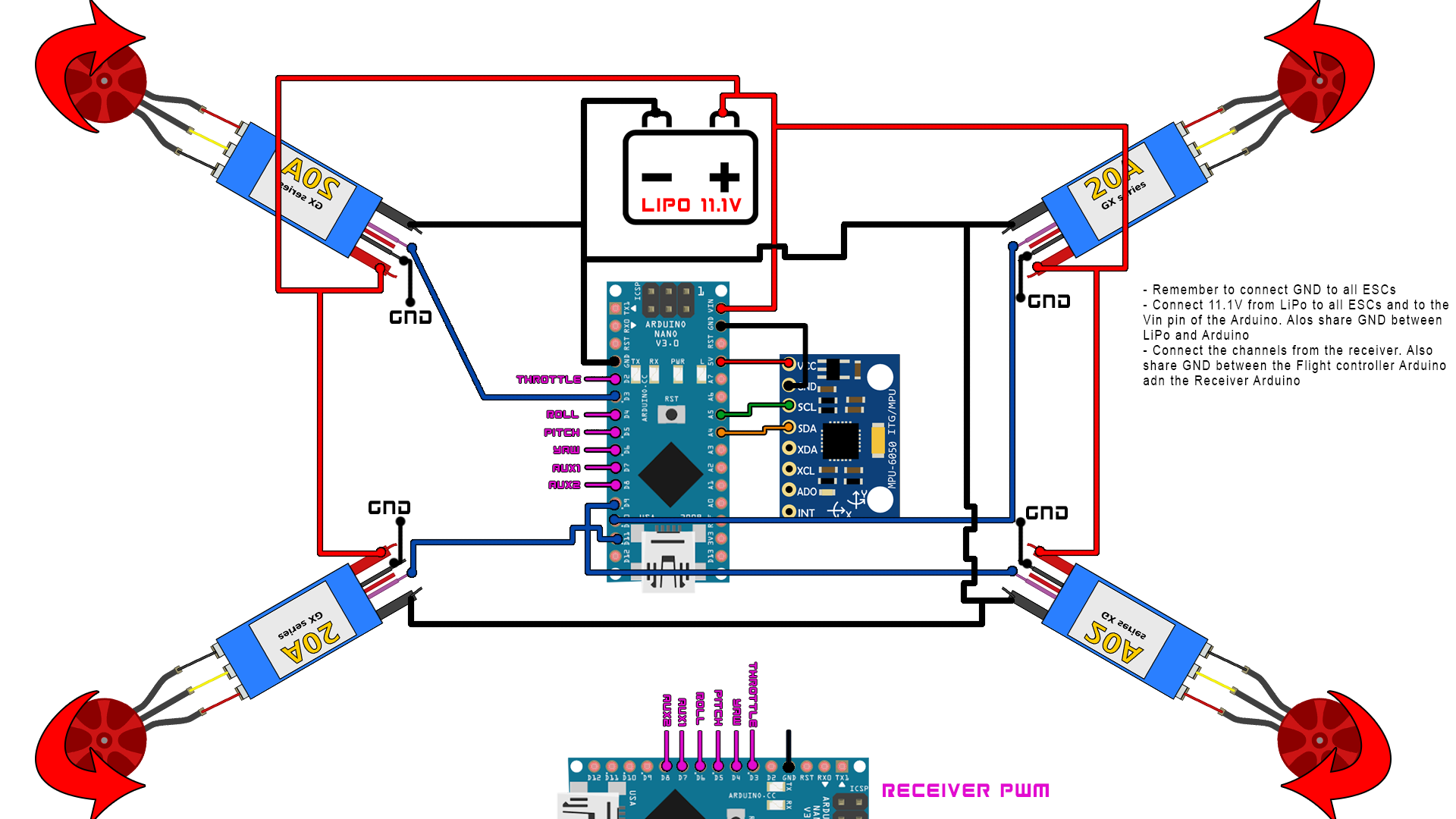 |
LEFT |
| FRONT |
The arduino UNO ist located in the middle of the multicopter. The orientation is shown in the image. The usb port is the backside of the drone. It has a connection to the remote sensor and reads in the pwm control signals from the remote control. Via I2C a MPU6050 is connected and can provide gyro and accelerometer data. The power supply is done via a power separation board to spread the power supply to every engine.
- Power Supply
The power is provided via a 11.7V 3 Cell LIPO accumulator The voltage is send to the esc and is converted to 5V to provide power to the arduino and the remote receiver.
- ESC Signal Connection
The connection of the esc cables to the sensor board is shown in the next image:


| Front Right | Rear Right | Rear Left | Front Left |
|---|---|---|---|
| GPIO 4 | GPIO 5 | GPIO 6 | GPIO 7 |
| CCW ⭯ | CW ⭮ | CCW ⭯ | CW ⭮ |
- Remote Signal Connection The signal of the remote receiver are processed via interrupt handling on the arduino, this is why i need to attach the ports to specific pins on the UNO. Because of a broken pin at GPIO8 it was not possible to use the same sketch as YMFC, so i need to shift the GPIO Interrupts by one. By this i was not able to use the remote LED on GPIO 12.
| CHANNEL 1 | CHANNEL 2 | CHANNEL 3 | CHANNEL 4 |
|---|---|---|---|
| GPIO 9 | GPIO 10 | GPIO 11 | GPIO 12 |
| Roll 🡰 🡲 | Pitch 🡱 🡳 | Yaw ⭯ ⭮ | Throttle ⮥ ⮦ |
- Arduino Sensor Calibration

- Arduino ESC Calibration
- Arduino Flight Controller Simple
- Arduino Flight Controller
- [REQ1] MC must be able to turn of startup state without motors are turning : Checked
- [REQ2] MC should never start rotors: Checked
- [REQ3] MC should start rotors only if throttle not zero and modus in start: Checked
- [REQ4] MC must not be able to turn state to shutdown while flying : UNCHECKED!!!
+ [REQ1] MC must be able to turn of startup state without motors are turning : Checked
+ [REQ2] MC should never start rotors: Checked
+ [REQ3] MC should start rotors only if throttle not zero and modus in start: Checked
- [REQ4] MC must not be able to turn state to shutdown while flying : UNCHECKEDFMEA Risk Table