fix crashes in AMCL #1152
Merged
fix crashes in AMCL #1152
Conversation
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
|
fix #1151 about amcl crash. |
mikeferguson
approved these changes
Oct 19, 2021
|
Just going to wait for CI to complete, then I'll merge this |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
fix #1151 about move_base crashes.
if the LaserScan.msg is malformed, the move_base will crash.
sensor_msgs/LaserScan.msg:
std_msgs/Header header
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment #it seems the value is below zero or beyond INT_MAX, roscore will throw a runtime_error.
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
in roscpp_core/rostime/include/ros/impl/duration.h
if (sec64 < std::numeric_limits<int32_t>::min() || sec64 > std::numeric_limits<int32_t>::max())throw std::runtime_error("Duration is out of dual 32-bit range")in roscpp_core/rostime/include/ros/impl/time.h
if (sec64 < 0 || sec64 > std::numeric_limits<uint32_t>::max())throw std::runtime_error("Time is out of dual 32-bit range");before fix:
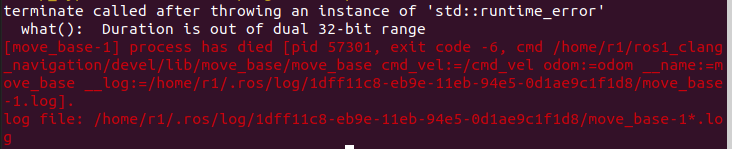
after fix:
