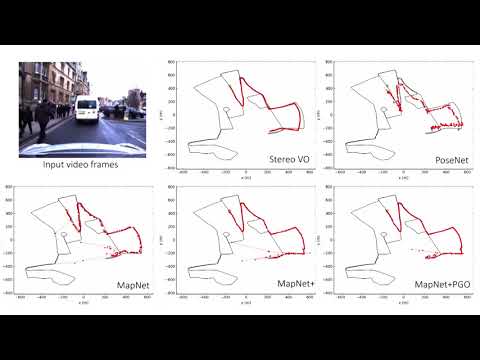
 This is the project page for the CVPR 2018 Spotlight paper "Geometry-Aware Learning of Maps for Camera Localization". Our algorithm MapNet allows you to estimate the pose of a camera in a known scene, from a sequence of images, in a completely data-driven manner. More importantly, it enables you to use unsupervised videos from that scene to continue improving the deep network.
This is the project page for the CVPR 2018 Spotlight paper "Geometry-Aware Learning of Maps for Camera Localization". Our algorithm MapNet allows you to estimate the pose of a camera in a known scene, from a sequence of images, in a completely data-driven manner. More importantly, it enables you to use unsupervised videos from that scene to continue improving the deep network.
Paper | Supplementary Material
Project Page at Nvidia | Github | Trained PyTorch Models
If you find this code useful for your research, please cite our paper
@inproceedings{mapnet2018,
title={Geometry-Aware Learning of Maps for Camera Localization},
author={Samarth Brahmbhatt and Jinwei Gu and Kihwan Kim and James Hays and Jan Kautz},
booktitle={IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2018}
}

{kind=link}