This ROS-package provides some utilities to cope with the noisy and dense data of the kinect and to perform efficiently some useful conversions such as depth image to point cloud or point cloud to laserscan.
This project was build with ROS Kinetic but should work on older ROS versions as well. In addition to that, this project depends on the ROS packages cv_bridge, pcl_ros and tf2_sensor_msgs. You will need to install them, if they are not already installed in your system. More about that in a moment.
Clone the repo into your ROS src folder:
cd ~/catkin_ws/src
git clone https://github.com/tud-pses/pses_kinect_utilities.git
cd ..
Install all dependencies of the package:
rosdep install pses_kinect_utilities
Build the package with catkin_make:
catkin_make
Please feel free to browse our wiki, where you can find instructions on how to use and configure this package.
If you're looking for a documentation of the code, please follow this link:
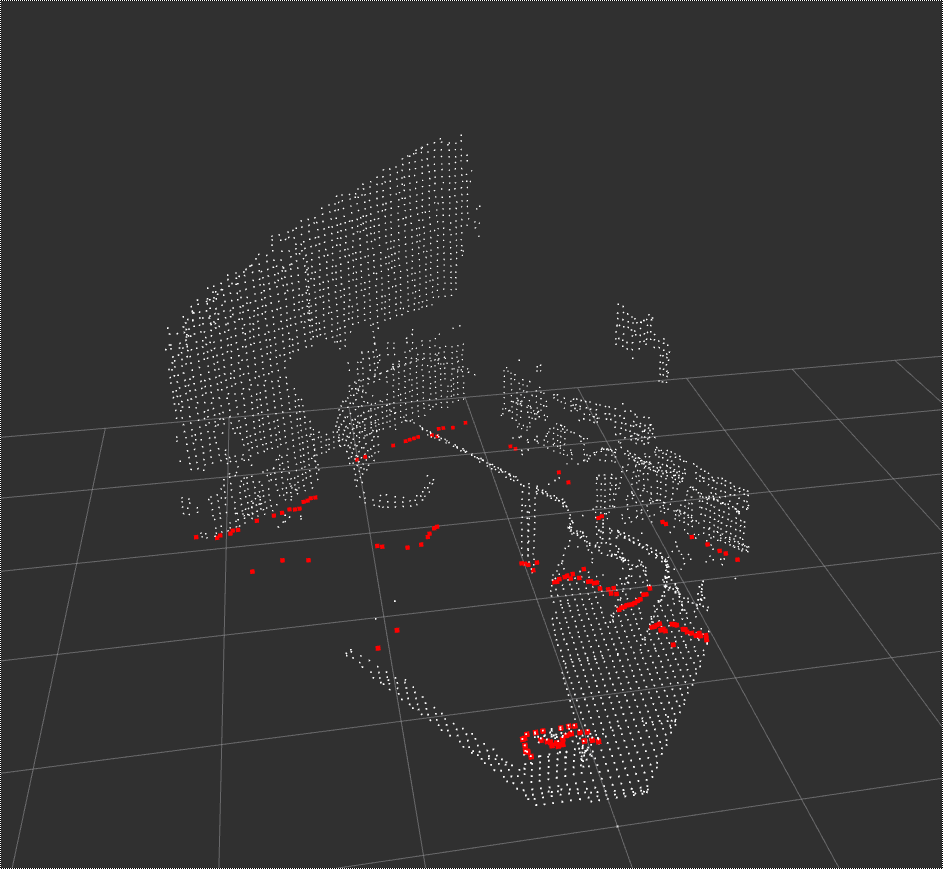
Here are some screenshots from our toolkit:

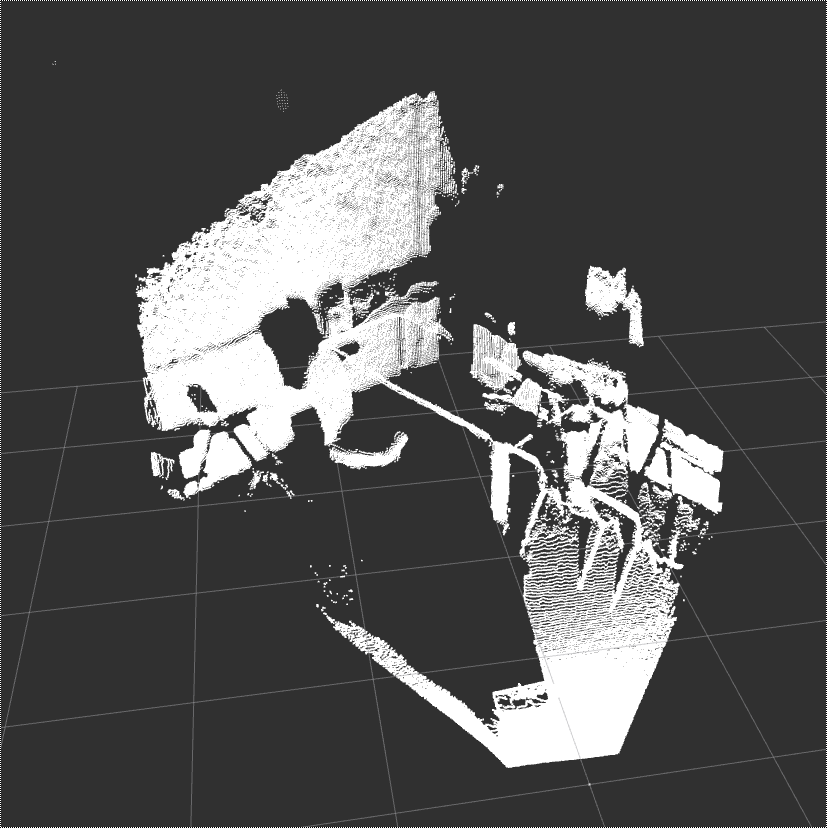
Point cloud computed and published by our package
Note: We implemented our own point cloud conversion, which is performed on the GPU using a opencl kernel. Therefore it is more efficient and faster than the pointcloud delivered by the kinect2_bridge or the package depth_image_proc
- Nicolas Acero
- Sebastian Ehmes