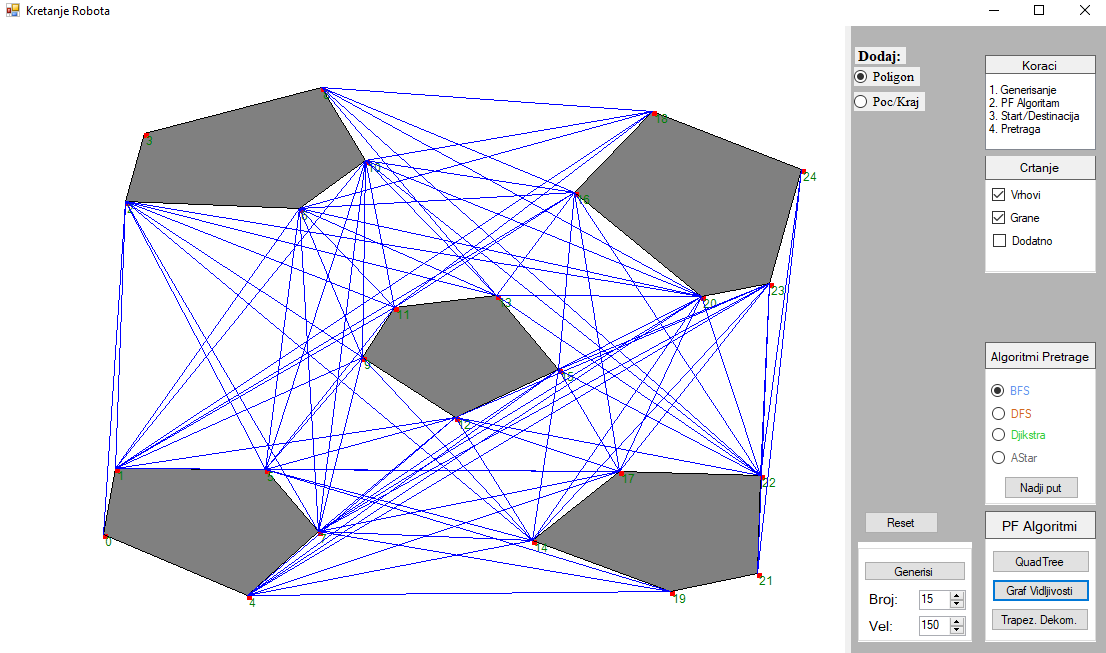
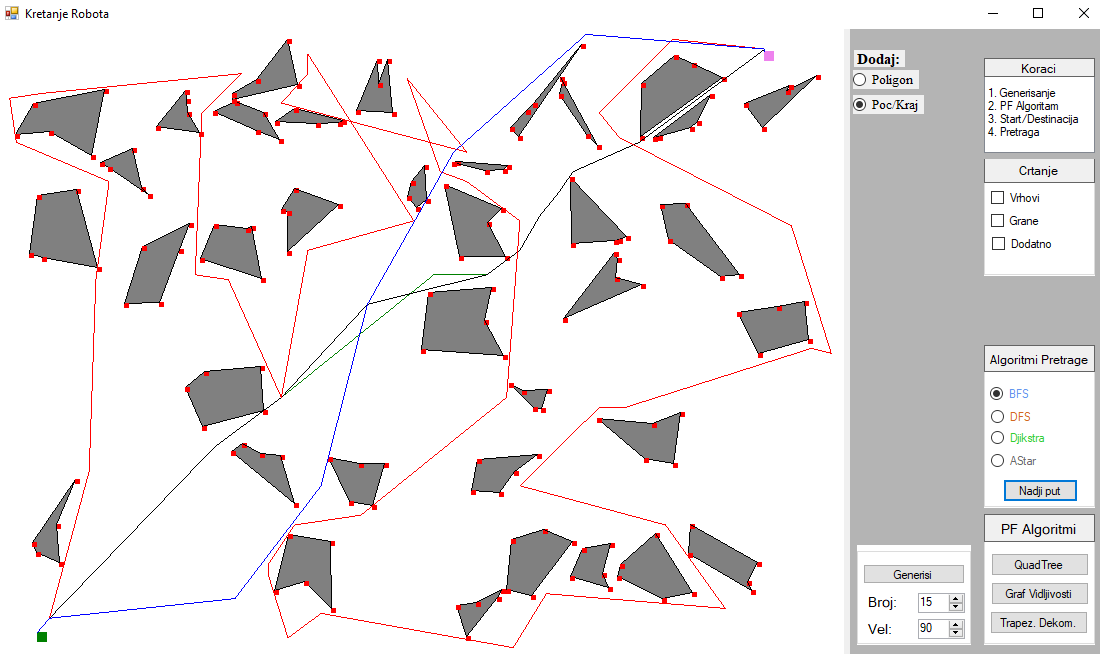
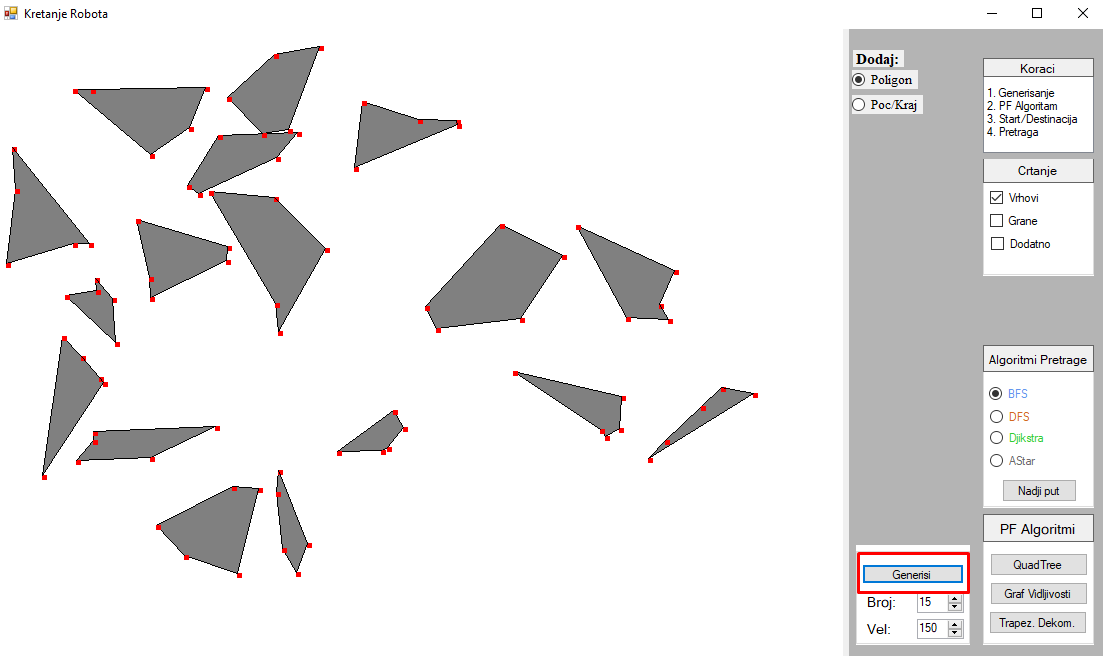
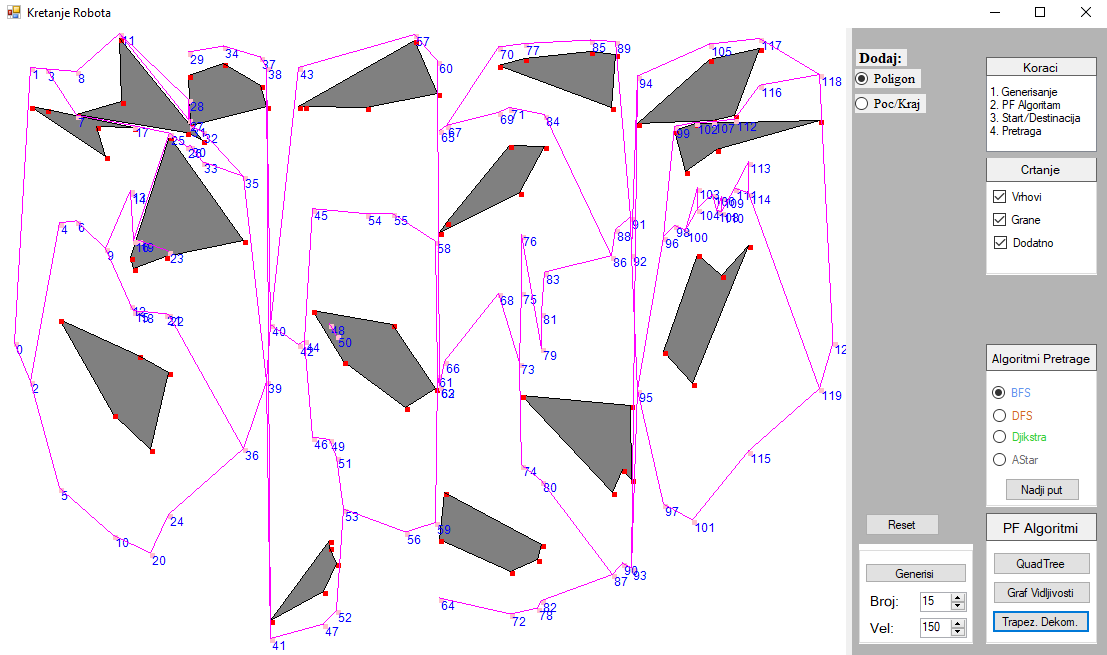
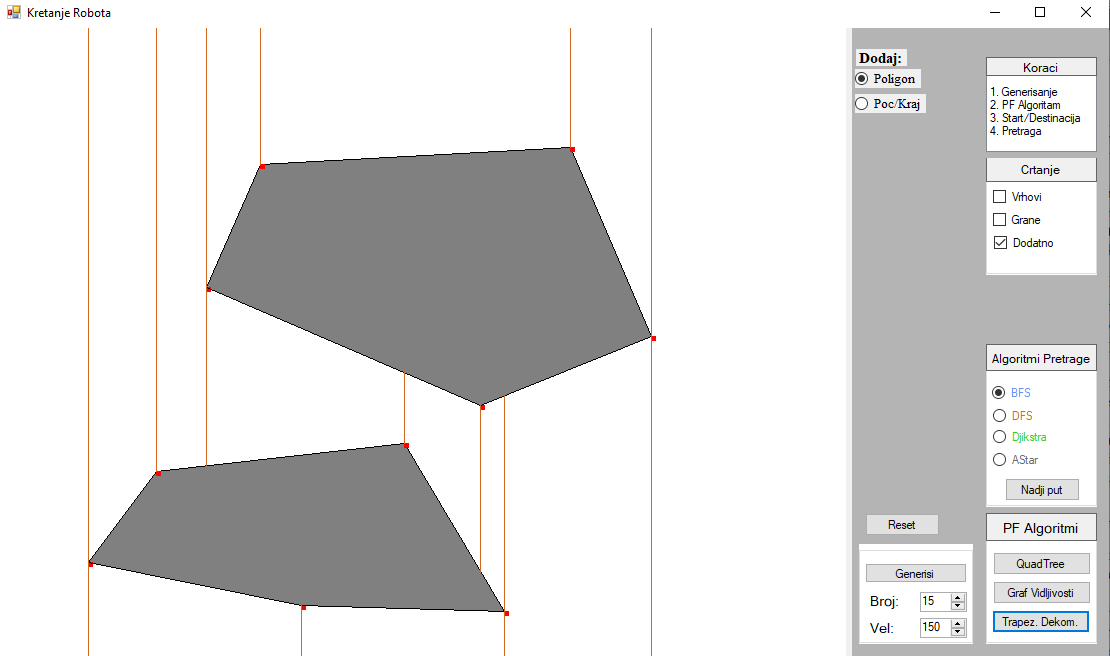
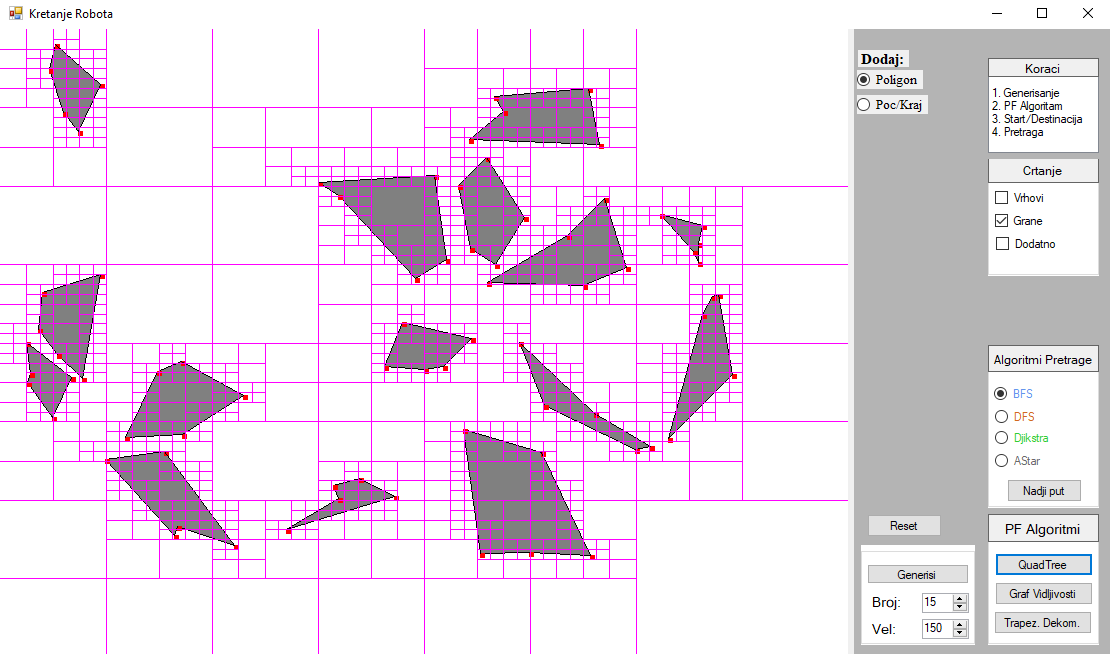
Path planning (with space configuration) algorithms (Trapezoid decomposition, Visibility graph and QuadTree)
- All algorithnms implemented in the project are using naive implementation. Further requirement needed to optimize and correctly finish trapezoid decomposition.
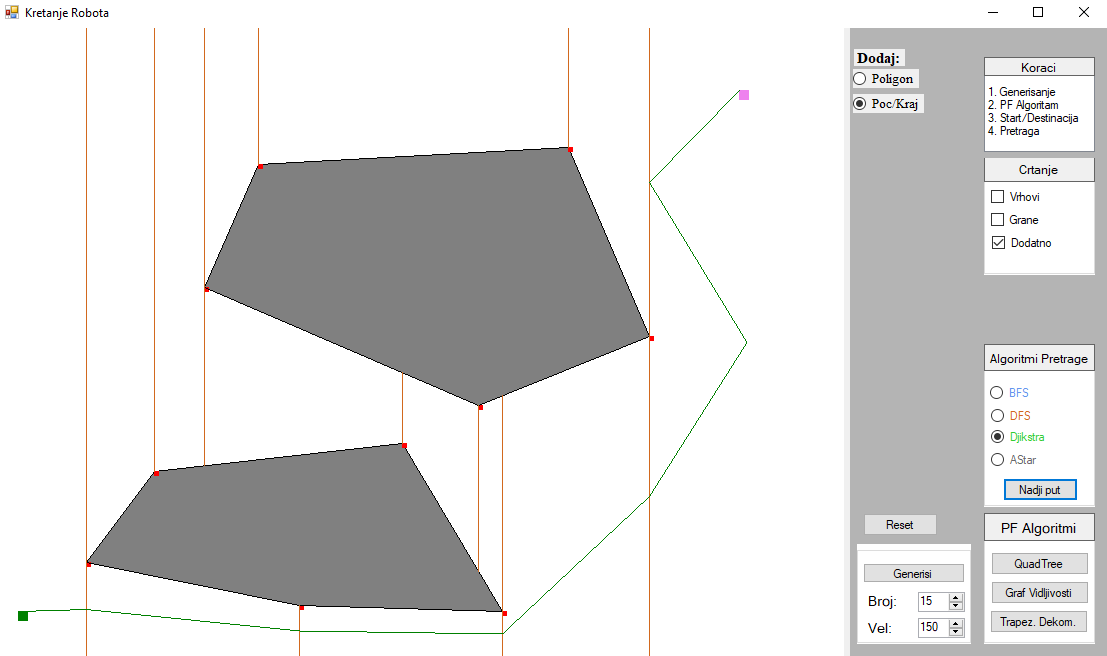
- After finding configuration space and setting starting and ending points inside the space you are able to run DFS, BFS, Djisktra and AStar algorithms to find the path.
- Maximum vertices for each osbstacle is 5 (you can change it)
- I'm using shortest euclidean distance to connect the start, end nodes. For better results you would add these in the graph.
- Project is written in Croatian/Bosnian/Serbian, all variables are set with that in mind.
- More efficient implementation (faster time complexity with sweep-line and radial sweep)
- Check if the start/end can be directly linked before the path finding algorithms
- Adjust how start/end are inserted (during the creation of the graph)