{kind=link}
 PythonVehicleControl is an environment for experimentation of control algorithms and data visualization of autonomous vehicles. This project provides:
1. Simulation environment (i.e. dynamics model, path planning & control algorithms)
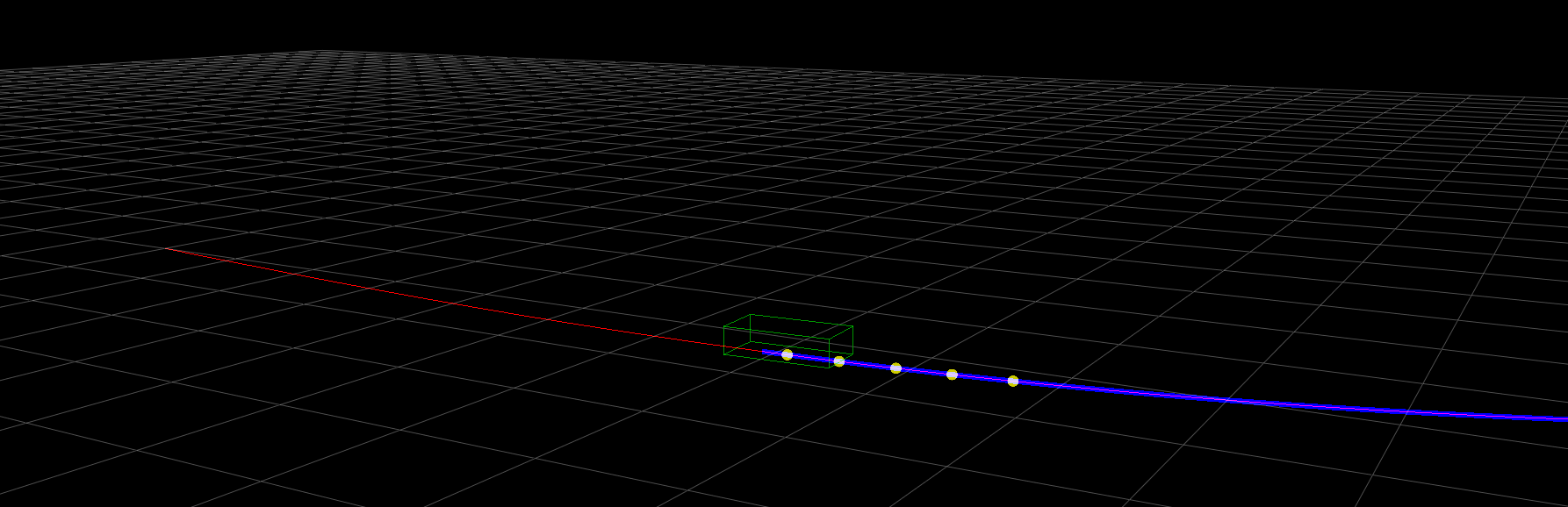
2. Declarative visualization (i.e. animated 3D objects and 2D graphs)
3. Interactive GUI
The project is written in python and is a casual attempt to solve some of the daily challenges in desigining control algorithms for autonomous vehicles and visualizing their data in a modulalar and reconfigurable manner.
PythonVehicleControl is an environment for experimentation of control algorithms and data visualization of autonomous vehicles. This project provides:
1. Simulation environment (i.e. dynamics model, path planning & control algorithms)
2. Declarative visualization (i.e. animated 3D objects and 2D graphs)
3. Interactive GUI
The project is written in python and is a casual attempt to solve some of the daily challenges in desigining control algorithms for autonomous vehicles and visualizing their data in a modulalar and reconfigurable manner.
This project is being developed with Python 3 and uses PythonRobotics (https://github.com/AtsushiSakai/PythonRobotics) as a submodule. For visualization, pyqtgraph is used. For a detailed list of dependencies, please refer to the requirements.txt file.
To install this project, first download with the following url.
git clone --recurse-submodules https://github.com/yongkyuns/PythonVehicleControl.gitMove to the downloaded folder.
cd PythonVehicleControlThen install the required packages.
pip install -r requirements.txt
pip install git+https://github.com/pyqtgraph/pyqtgraph.git@developNow we are ready to run!
To run the simulator, use the following shell commands in the project directory:
python main.pyFor a more detailed documentation, please refer to https://pythonvehiclecontrol.readthedocs.io/en/master/#
Pull requests are welcome. For major changes, please open an issue first to discuss what you would like to change.