Added support for fixed yaw mag calibration #12863
Merged
Conversation
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
rmackay9
reviewed
Dec 2, 2019
rmackay9
reviewed
Dec 2, 2019
| @@ -3725,6 +3738,10 @@ MAV_RESULT GCS_MAVLINK::handle_command_long_packet(const mavlink_command_long_t | |||
|
|
|||
| return MAV_RESULT_UNSUPPORTED; | |||
|
|
|||
| case MAV_CMD_FIXED_MAG_CAL_YAW: | |||
There was a problem hiding this comment.
I guess this command could also arrive as part of a COMMAND_INT?
|
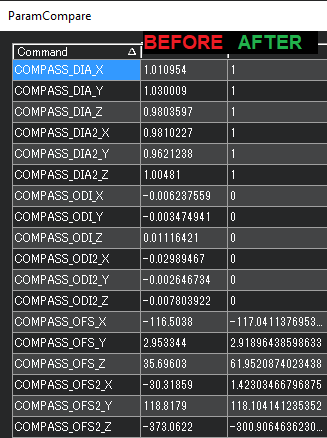
I tested this out on my copter after adding a small change to allow triggering it from channel 6. The results look ok although some of the z-axis offsets are significantly different. |
94bb199
to
aeca392
Compare
this is a fast compass calibration that uses a yaw value provided by the user.
aeca392
to
2aec1f8
Compare
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Add this suggestion to a batch that can be applied as a single commit.
This suggestion is invalid because no changes were made to the code.
Suggestions cannot be applied while the pull request is closed.
Suggestions cannot be applied while viewing a subset of changes.
Only one suggestion per line can be applied in a batch.
Add this suggestion to a batch that can be applied as a single commit.
Applying suggestions on deleted lines is not supported.
You must change the existing code in this line in order to create a valid suggestion.
Outdated suggestions cannot be applied.
This suggestion has been applied or marked resolved.
Suggestions cannot be applied from pending reviews.
Suggestions cannot be applied on multi-line comments.
Suggestions cannot be applied while the pull request is queued to merge.
Suggestion cannot be applied right now. Please check back later.
This is a fast compass calibration given vehicle position and yaw. The calibrations results in zero diagonal and off-diagonal elements, so is only suitable for vehicles where the field is close to spherical. It is useful for large vehicles where moving the vehicle to calibrate it is difficult.
The offsets of the selected compasses are set to values to bring them into consistency with the WMM tables at the given latitude and longitude. If compass_mask is zero then all enabled compasses are calibrated.
This assumes that the compass is correctly scaled in milliGauss
MAVProxy implements this using the "magcal yaw" command.
This PR depends on this:
ArduPilot/mavlink#113