Hinge line definition does not cover all control surface architectures #631
Comments
rainman110
added a commit
to DLR-SC/tigl
that referenced
this issue
Jul 14, 2021
Addresses issue #816 and DLR-SL/CPACS#631
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Current state
pathelement by aninnerHingePointand andouterHingePointxsiandetacoordinates are both defined in the wing component segment as it is the parent of the control surfaceetaposition of theinnerHingePointandouterHingePointis determined by theouterShapeelement ->innerShape/outerShape->etaLE(etaTEdoes not influence this coordinate, i.e. no interpolation between LE and TE position)xsiposition (hingeXsielement) is measured from the leading edge of the parent wing structurehingeRelHeightelement which refers to the local thickness of the wing at the hinge point position (0 = lower skin; 1 = upper skin)Problem description
The hinge line cannot be outside of the parent wing geometry, because:
eta,xsiandhingeRelHeightmay only take values between 0 and 1 and must therefore be within the parent wing geometryCertain configurations are not possible to model with the current definition, e.g.:
tracks issue Kinematic description in controlSurfaceTrackTypeType for different steps along path #605 (@raedma): A configuration like trackType 2 subType2 is not possible
similar example [Strüber 2014]:
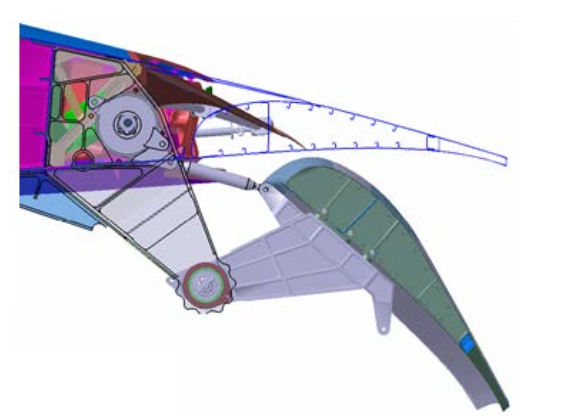
Canard wings: hinge line is out of the parent wing geometry and the hinge line could be better described by a hinge point and direction vector [Quora; accessed 17-04-2020]

Solution
... will be documented in this issue. Any suggestions welcome.
Current problems to consider in this context:
stepdefinition?etatranslation necessary for the hinge point? (could solve the problem to define a hinge line which is inside of a canard wing geometry)The text was updated successfully, but these errors were encountered: