Low cost Multi-GNSS system that has 3 UbloxNeo-M8N modules in one unmanned ground vehicle. Data redundancy of the Multi-GNSS system allows a greater number of samples and better filtering data. Through experiments on different circuits, we obtained sample rates of 3 Hz.


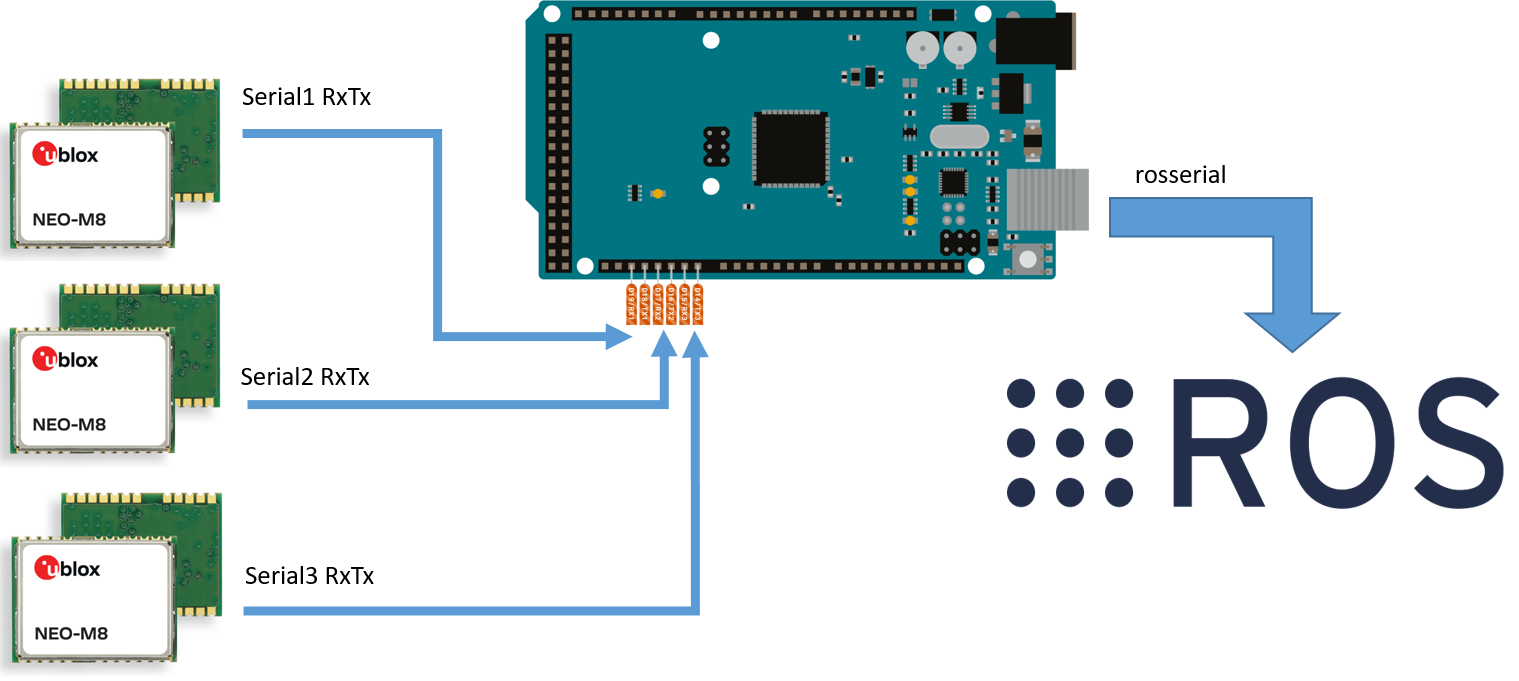
This system is implemented on the Arduino Mega platform whit the TinyGPS++ library and 3 UbloxNeo-M8N modules. The location of the UGV is obtained by removing the measurements that have an out-of-range deviation. This data is published to ROS using the rosserial package.
{kind=link}
The results are exposed in the publication: "INTEGRATION AND EVALUATION OF A MULTI-GNSS SYSTEM IN AN UNMANNED GROUND VEHICLE"

