Import
To import existing models into Phobos, there are two approaches:
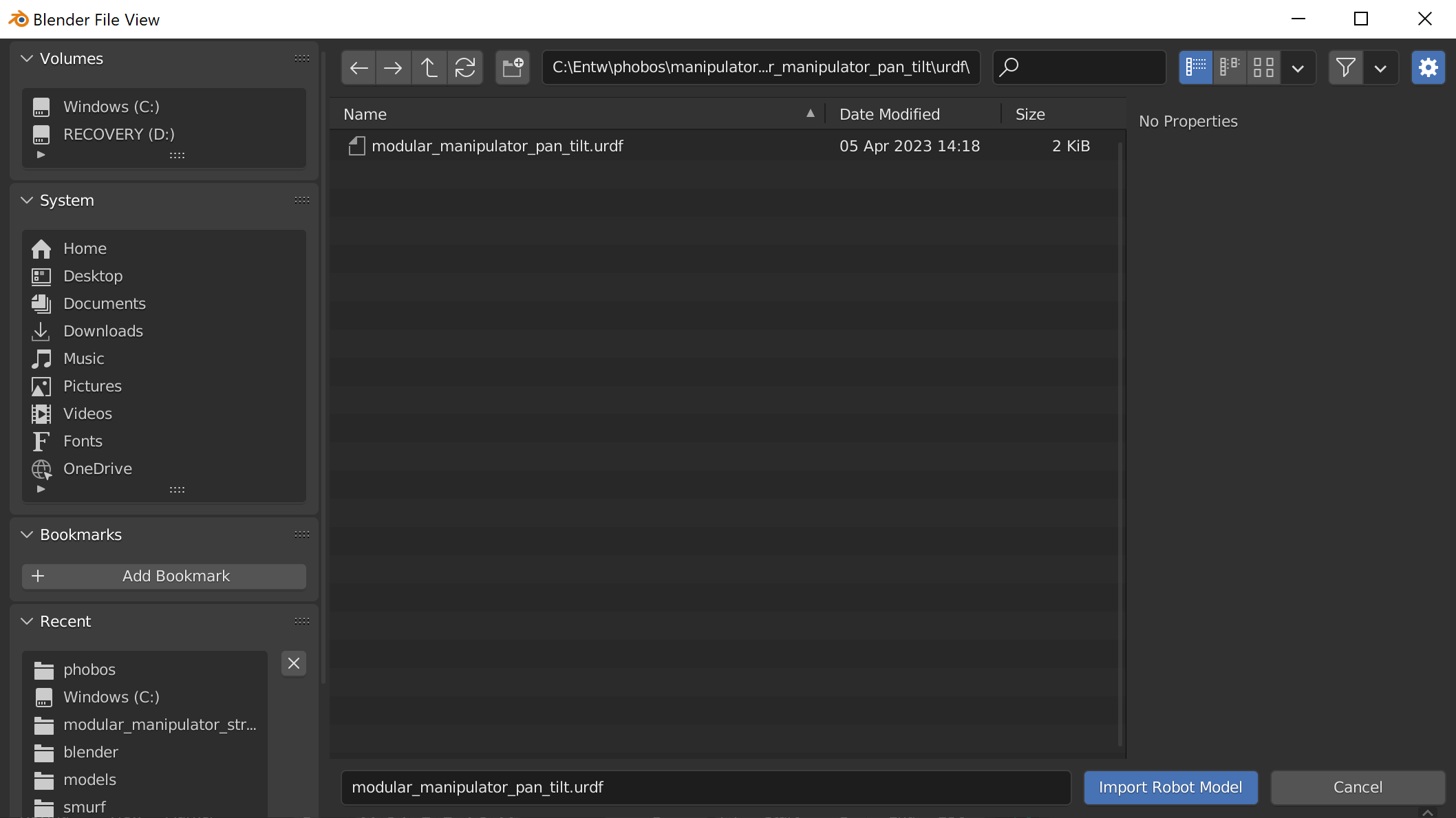
Phobos is able to import all formats that you can see on the formats page. You can import such a file with the Import Robot Model button from the Import panel of the Phobos toolbar. This will open a file selector, where you can select the file path of your model. After confirming, your model will be imported as a Phobos model. In case anything does not work as expected, check the logs for more information.
Most CAD software allows to export meshes of parts as individual files in a common coordinate system. This means that the origin of all objects rests at a common origin and only the vertices of the meshes are placed such that when all objects are overlaid at their common origin, the original CAD part is assembled. This allows to simply import all such exported meshes in Blender and end up with correctly placed objects.
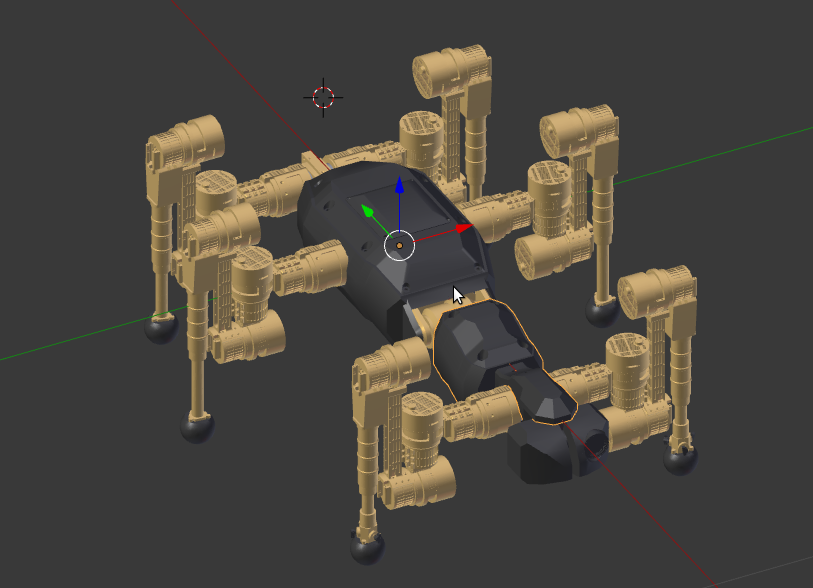
The meshes are placed in correct relation to one another when exported as a group from CAD, however each part's origin is at the global origin of Blender.
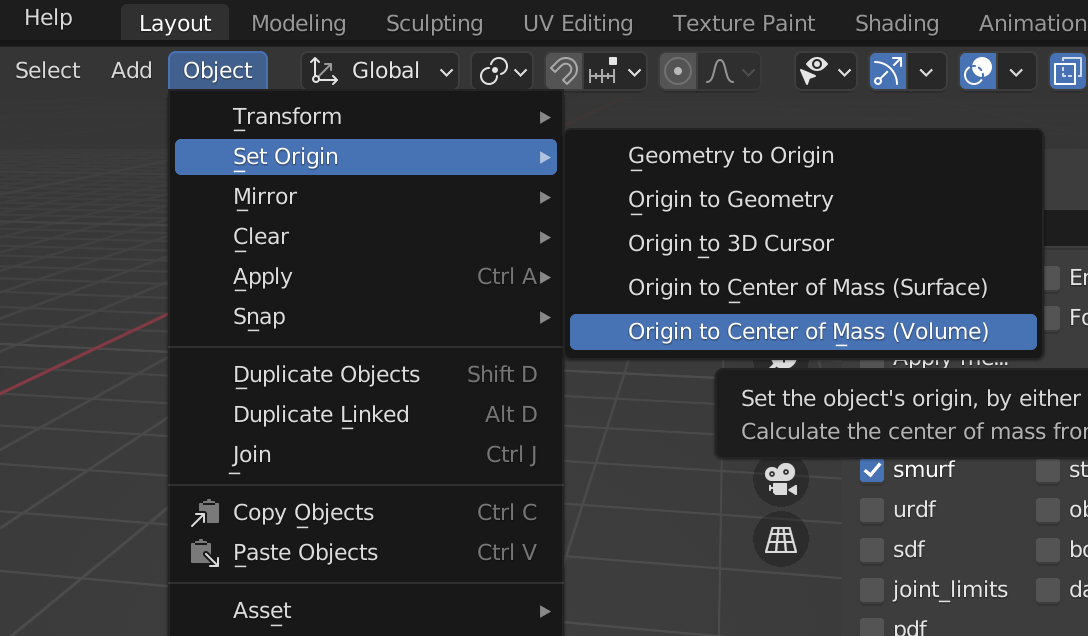
The origins of the individual parts can then be moved to the individual objects' center of mass (COM), center of geometry etc. by selecting the entry in the Object menu:
Moving the origins of the objects to their approximated COM.
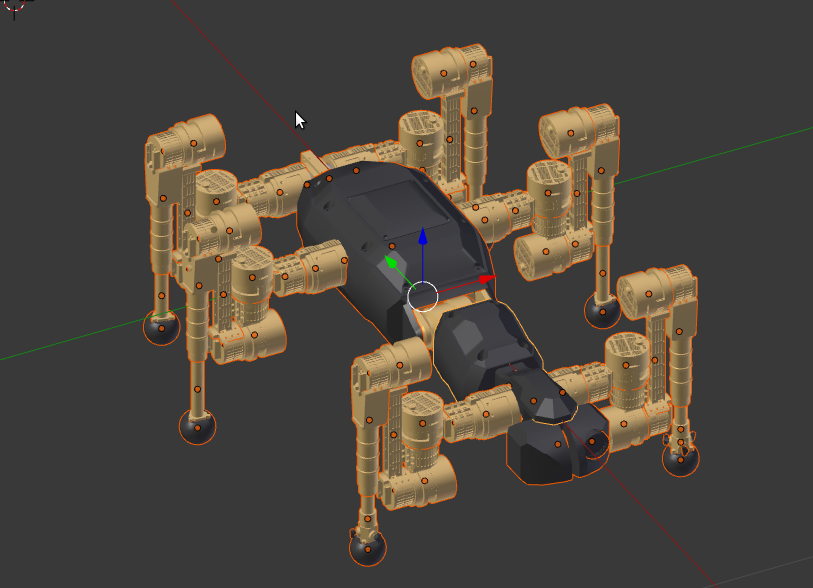 Now every part has it's own origin, which will be important for adding
collision objects etc.
Now every part has it's own origin, which will be important for adding
collision objects etc.
The calculated COM assumes a homogeneous mass distribution throughout the volume of a mesh, which will rarely be the case for real robots. To obtain a precise model, you will therefore have to adjust the COM of the robot's parts.
Another possibility is to export every part from CAD with the mesh's origin at the actual center of mass of that part (for which it is necessary to create coordinate systems in CAD residing at the COM). This however leads to the problem of then placing the individually exported parts correctly with respect to one another in Blender. There currently is no 'one size fits all' solution to this issue and every robot project team will have to figure out the most convenient way for them.
There are some solutions for exporting a robot from CAD not only in meshes, but as a URDF or different kinematic description. If such an export is available to you, it may be far more useful than importing raw mesh data.
Either way, you can import the meshes of your choice by clicking File -> Import -> format, with 'format' being whatever mesh format you chose to import (we recommend stl).
![]() Back to top.
Back to top.