Connect a jetson nano with pixhawk using dronekit #1162
Description
Hello everyone,
I am trying to connect a jetson nano with pixhawk using dronekit, the fact is that when I use the USB connection the program that I paste below indicates that the vehicle is unarmed when from the Mission Planner it appears that everything is in order, and when I do it by the UART protocol gets the following error.
jetbot@nano-4gb-jp45:~/repos/pidronescripts/dk/rover$ sudo python3 rover_velocity_based_movement.py --connect /dev/ttyTHS1
WARNING:dronekit:Link timeout, no heartbeat in last 5 seconds
ERROR:dronekit.mavlink:Exception in MAVLink input loop
Traceback (most recent call last):
File "/home/jetbot/.local/lib/python3.6/site-packages/dronekit/mavlink.py", line 211, in mavlink_thread_in
fn(self)
File "/home/jetbot/.local/lib/python3.6/site-packages/dronekit/_init_.py", line 1371, in listener
self._heartbeat_error)
dronekit.APIException: No heartbeat in 30 seconds, aborting.
Traceback (most recent call last):
File "rover_velocity_based_movement.py", line 105, in <module>
vehicle = connectMyCopter()
File "rover_velocity_based_movement.py", line 21, in connectMyCopter
vehicle = connect(connection_string,baud=57600,wait_ready=True)
File "/home/jetbot/.local/lib/python3.6/site-packages/dronekit/_init_.py", line 3166, in connect
vehicle.initialize(rate=rate, heartbeat_timeout=heartbeat_timeout)
File "/home/jetbot/.local/lib/python3.6/site-packages/dronekit/_init_.py", line 2275, in initialize
raise APIException('Timeout in initializing connection.')
dronekit.APIException: Timeout in initializing connection.
For me it is something with the dronekit or the code that I am using.
Could you help me how to solve this problem. Thanks greetings.
The python code used is the following
##########DEPENDENCIES#############
from dronekit import connect, VehicleMode,LocationGlobalRelative,APIException
import time
import socket
import exceptions
import math
import argparse
from pymavlink import mavutil
#########FUNCTIONS#################
def connectMyCopter():
parser = argparse.ArgumentParser(description='commands')
parser.add_argument('--connect')
args = parser.parse_args()
connection_string = args.connect
vehicle = connect(connection_string,baud=57600,wait_ready=True)
return vehicle
def arm():
while vehicle.is_armable!=True:
print("Waiting for vehicle to become armable.")
time.sleep(1)
print("Vehicle is now armable")
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!='GUIDED':
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
print("Vehicle now in GUIDED MODE. Have fun!!")
vehicle.armed = True
while vehicle.armed==False:
print("Waiting for vehicle to become armed.")
time.sleep(1)
print("Vehicle is now armed.")
return None
##Send a velocity command with +x being the heading of the drone.
def send_local_ned_velocity(vx, vy, vz):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0,
0, 0,
mavutil.mavlink.MAV_FRAME_BODY_OFFSET_NED,
0b0000111111000111,
0, 0, 0,
vx, vy, vz,
0, 0, 0,
0, 0)
vehicle.send_mavlink(msg)
vehicle.flush()
def reverse(direction):
# create the CONDITION_YAW command using command_long_encode()
msg = vehicle.message_factory.command_long_encode(
0, 0, # target system, target component
mavutil.mavlink.MAV_CMD_DO_SET_REVERSE, #command
0, #confirmation
direction, #Param 1, 0 for forward 1 for backward.
0, #Param 2, yaw speed deg/s
0, #Param 3, Direction -1 ccw, 1 cw
0, # Param 4, relative offset 1, absolute angle 0
0,0, 0) # Param 5-7 not used
vehicle.send_mavlink(msg)
vehicle.flush()
##Send a velocity command with +x being the heading of the drone.
def send_global_ned_velocity(vx, vy, vz):
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_LOCAL_NED, #frame
0b0000111111000111, #type_mask (only speeds enabled)
0, 0, 0, # x, y, z positions (not used)
vx, vy, vz, # x, y, z velocity in m/s
0, 0, 0, #x, y, z acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) #yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
vehicle.send_mavlink(msg)
vehicle.flush()
def backup(): ##rough function to easily reverse without needing to use a GPS navigation based movement
vehicle.mode = VehicleMode("MANUAL")
while vehicle.mode!='MANUAL':
print("Waiting for drone to enter MANUAL flight mode")
time.sleep(1)
vehicle.channels.overrides = {'2':1400}
time.sleep(1)
vehicle.channels.overrides = {'2':1500}
vehicle.mode = VehicleMode("GUIDED")
while vehicle.mode!='GUIDED':
print("Waiting for drone to enter GUIDED flight mode")
time.sleep(1)
##########MAIN EXECUTABLE###########
vehicle = connectMyCopter()
arm()
counter=0
while counter < 5:
send_local_ned_velocity(1,0,0)
print("Moving forward at 1 m/s with local NED")
time.sleep(1)
counter = counter + 1
counter=0
while counter < 5:
send_local_ned_velocity(1,1,0)
print("Turning to the right")
time.sleep(2)
send_local_ned_velocity(1,-1,0)
print("Turning to the left")
counter = counter + 1
counter=0
while counter < 5:
send_global_ned_velocity(1,0,0)
print("Moving TRUE NORTH")
time.sleep(3)
send_global_ned_velocity(-1,0,0)
print("MOVING TRUE SOUTH")
time.sleep(3)
send_global_ned_velocity(0,1,0)
print("MOVING TRUE EAST")
time.sleep(3)
send_global_ned_velocity(0,-1,0)
print("MOVING TRUE WEST")
time.sleep(3)
counter=5
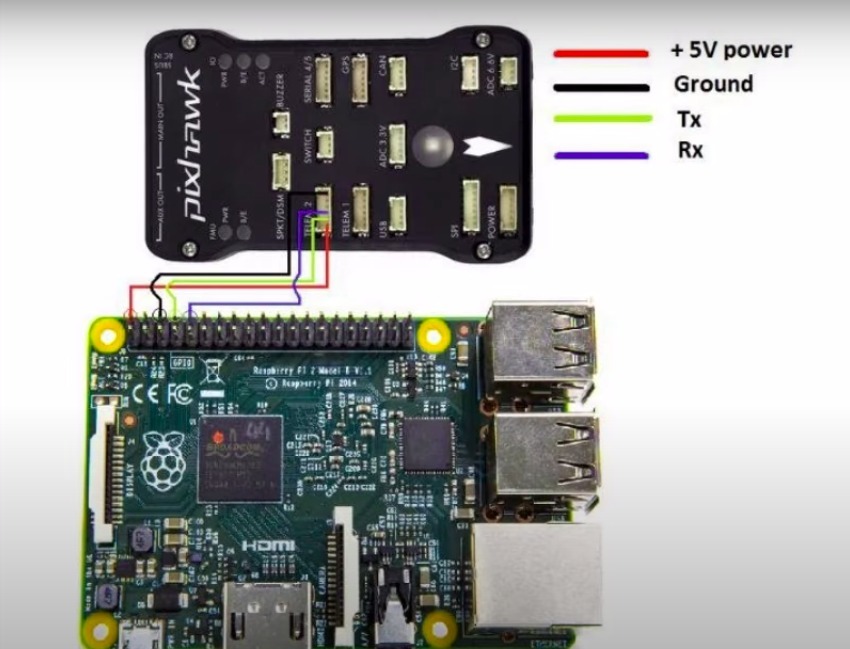
The wiring diagram is this (It's a Jetson nano instead of rasberry)