
- 2 dc motors
- 3 servo motors
- 2 H bridge
- Potentiometers for position control
- GUI made in Windows Forms
- Containes pictures and documents regarding robot kinematics
- Information about Inverse Kinematics (IK)
- Contians the whole code that controls the entire arm
- Contains the user interface built in C#. Provided all icons and c# code.


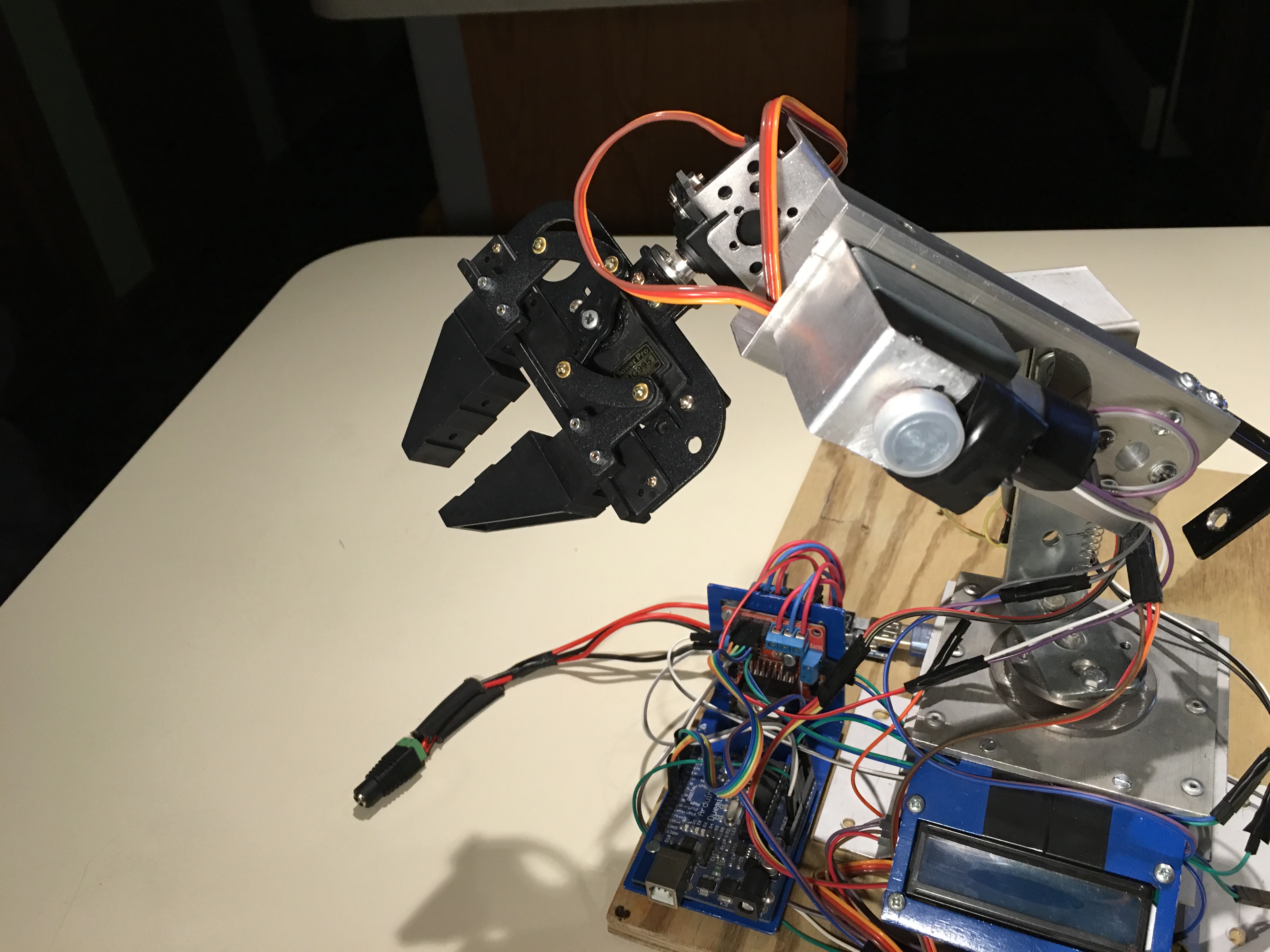
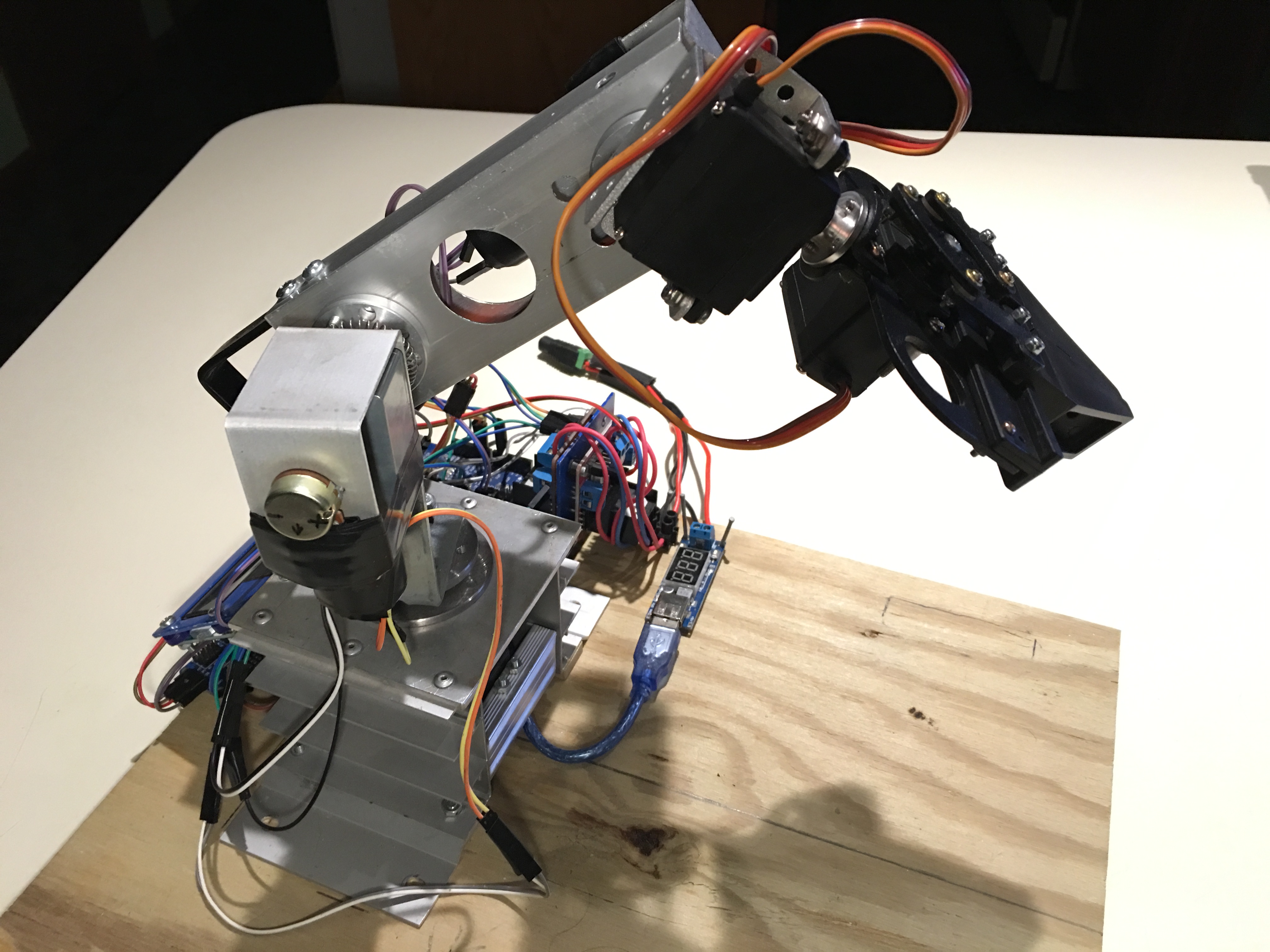
This was a hobby project built from scratch by me during my undergrad. Its main purpose was to gain personal experience in robotics.