This project uses a differential drive bot designed in Fusion 360 and simulates it in gazebo simulator. An Arduino is used along with HC-05 to control this bot via an app using bluetooth
- Start by installing the fusion2urdf plugin for Fusion 360 for converting your fusion design to URDF
- link to plugin: https://github.com/syuntoku14/fusion2urdf
- tutorial to install plugin: https://www.youtube.com/watch?v=TitHYg-5_j8
- Next start designing your bot in Fusion 360
- Tutorial for simple differential bot design and URDF conversion: https://youtu.be/cQh0gNfb6ro
- There are some steps missed in this tutorial due to which we require corrections in URDF file(watch this https://youtu.be/FYF1L440tdY else follow the following steps):
- following are the corrections required:
- Open myrobot.xacro file and navigate to REV1 joint, there replace with
- Now open gazebo.lauch file and under "right_wheel" and "left_wheel" reference change friction values to 150, set updateRate to 100, leftJoint to Rev2, rightJoint * to Rev1, wheel separation to 0.2, wheelDiameter to 0.1 and robotBaseFrame to base_link
- Copy the myrobot_description folder containing the URDF files to your (catkin workspace)/src folder
- Run catkin build once to build your package
- Now to run the simulation in gazebo you will find a gazebo.launch file in the myrobot_description/launch folder...(myrobot_description is the package name * containing your URDF files)
- To launch file use roslauch myrobot_description gazebo.launch
- When gazebo launches remember to push the play button to run the simulation as it is paused initially(you can change the arg name="paused" value to "true" in the gazebo.launch file so that it starts automatically when you launch the simulator)
- Run rostopic list command in terminal to check if /cmd_vel topic is present
- Run teleop rosrun teleop_twist_keyboard teleop_twist_keyboard.py in a new terminal window(if not installed use sudo apt-get install ros-melodic-teleop_twist_keyboard )
- Then check if the bot is moving after using the keyboard keys
- Install rosserial_python library
- Upload code to arduino
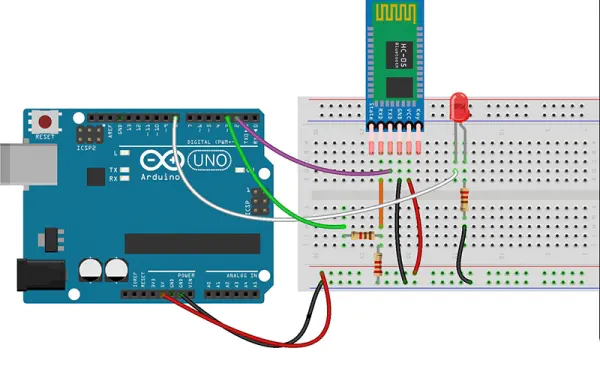
- Connect the HC-05 accordingly:
- Now connect the app to HC-05
- Run command roslauch myrobot_description gazebo.launch to run the robot model
- Run command rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0 _baud:=57600 to start communication between ROS and Arduino(change the port number according your port)
- Use to mobile app to control the bot in gazebo
- This can be easily done by uploading the Arduino sketch and running the turtlesim node