ECHO is an edge–cloud framework for language-driven whole-body control of humanoid robots. A cloud-hosted diffusion-based text-to-motion generator synthesizes motion references from natural language, while an edge-deployed RL tracker executes them in closed loop on the Unitree G1 humanoid.
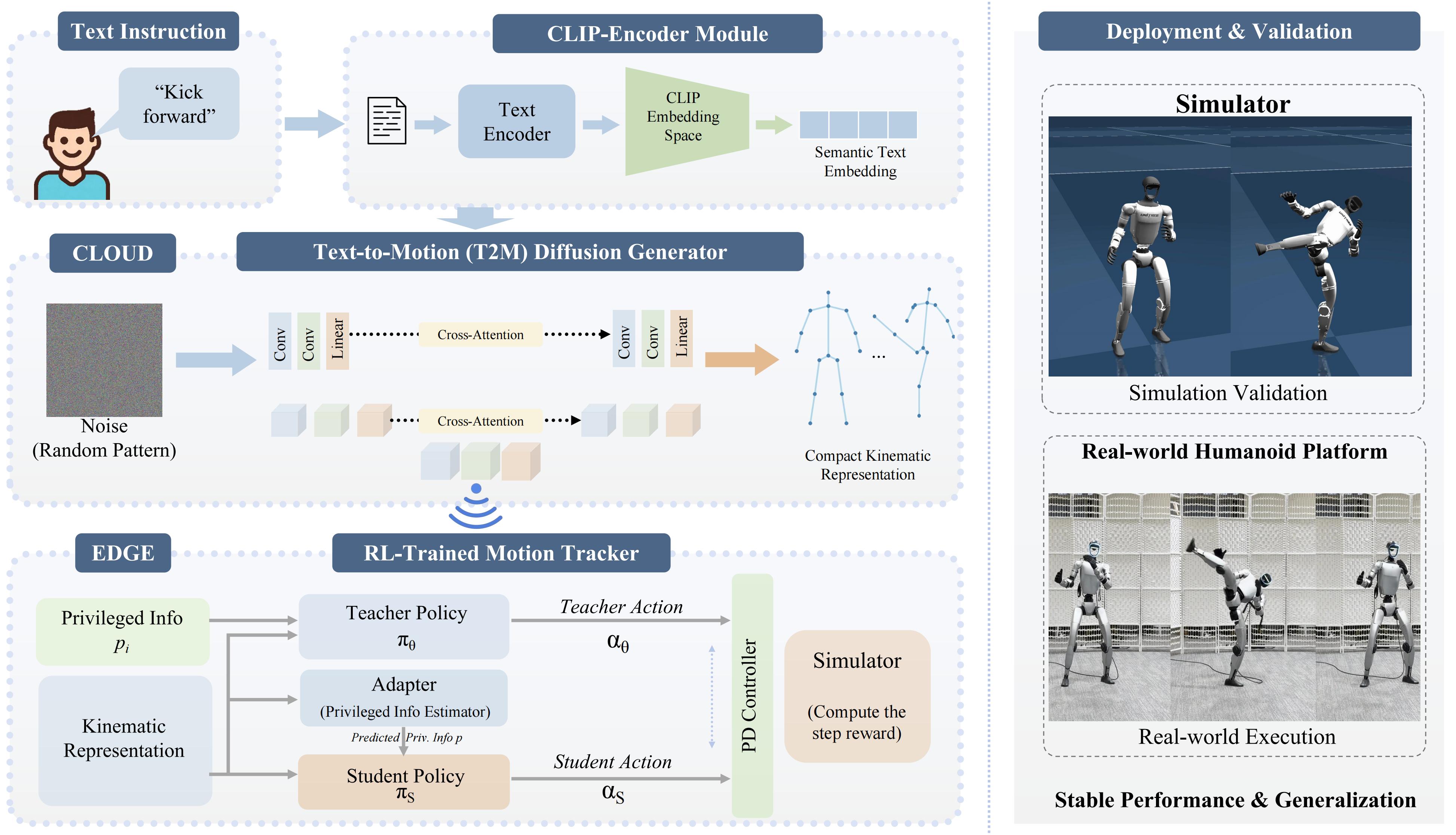
ECHO processes natural language instructions through a CLIP-conditioned diffusion model on a cloud GPU, producing 38D robot-native motion sequences in ~1 second. The motion is streamed via WebSocket to an edge-deployed ONNX tracking policy that runs at 50 Hz on the G1 with PD control and autonomous fall recovery.
More videos on the project page.
- Robot-native: generates directly in G1 29-DOF joint space — no human body model, no retargeting
- 38D velocity-based representation: joint angles + root velocity + root height + continuous 6D rotation
- Classifier-free guidance: DDIM sampling with 10 denoising steps produces motions in ~1 second on cloud GPU
- Edge deployment: ONNX tracking policy runs on CPU at 50 Hz with PD control and autonomous fall recovery
conda create -n echo python=3.10 -y
conda activate echo
conda install pytorch pytorch-cuda=12.8 -c pytorch -c nvidia -y
pip install -r generator/requirements.txt
# For WebSocket server
pip install -r generator/requirements_server.txtDownload from ModelScope (Hzzzz001/ECHO):
git clone https://www.modelscope.cn/Hzzzz001/ECHO.git checkpoints/| Checkpoint | Backbone | Dim | Inference |
|---|---|---|---|
checkpoints/robotv2/robotv2_38d_lite |
UNet (small) | 128 | ~1.0s |
checkpoints/robotv2/robotv2_38d |
UNet (full) | 512 | ~1.5s |
checkpoints/robotv2/robotv2_38d_transformer |
Transformer | 768 | ~3.0s |
Each checkpoint: opt.txt (config), model/latest.tar (weights), meta/{mean,std}.npy (normalization).
Normalization stats for the dataset: generator/data/Mean_38d.npy, generator/data/Std_38d.npy.
cd generator
python scripts/generate_robot.py \
--opt_path ../checkpoints/checkpoints/robotv2/robotv2_38d_lite/opt.txt \
--text_prompt "a person walks forward" \
--motion_length 4.0 \
--output_dir ./outputOutput: output/npz/000000.npz with joint_pos (T,29), root_pos (T,3), root_rot (T,4).
cd generator
python scripts/server_robot_ws.py \
--opt_path ../checkpoints/checkpoints/robotv2/robotv2_38d_lite/opt.txt \
--port 8000 --host 127.0.0.1Health check: curl http://127.0.0.1:8000/ → {"status":"running","service":"ECHO Motion Generation Server"}
WebSocket API: connect to ws://127.0.0.1:8000/ws, send JSON request, receive binary NPZ.
{"text": "walk forward slowly", "motion_length": 4.0, "num_inference_steps": 10, "seed": 42}Remote access via SSH tunnel: ssh -L 8000:127.0.0.1:8000 user@cloud-server
See generator/docs/WEBSOCKET_QUICKSTART.md and generator/docs/CLIENT_API.md for details.
cd generator
python scripts/evaluation.py \
--opt_path ../checkpoints/checkpoints/robotv2/robotv2_38d/opt.txt \
--evaluator_dir ../checkpoints/checkpoints/robot_evaluatorMetrics: FID, R-Precision Top-1/2/3, Matching Score, Diversity, Multimodality, Motion Safety Score (MSS), Root Trajectory Consistency (RTC).
Requires preprocessed 38D robot motion data.
cd generator
accelerate launch scripts/train.py \
--dataset_name robotv2 \
--name robotv2_experiment \
--batch_size 64 \
--num_train_steps 500000 \
--model_ema \
--model_type unet \
--base_dim 512 \
--lr 2e-4See deploy/README.md — sim2sim test, real robot setup, text-to-motion client, and ONNX policy inference.
| Index | Field | Dims | Description |
|---|---|---|---|
| 0–28 | joint_pos |
29 | Joint angles (rad) in Isaac Gym order |
| 29–30 | root_vel_xy |
2 | Root planar velocity in body frame |
| 31 | root_z |
1 | Root height above ground (m) |
| 32–37 | root_rot_6d |
6 | Continuous 6D root rotation |
50 FPS, max 490 frames (~9.8s). Velocity-based root motion avoids global drift. 6D rotation prevents gimbal lock.
ECHO_CODE/
├── generator/ # Cloud diffusion generator
│ ├── models/ # EchoUnet (1D Conv), Transformer
│ │ ├── unet.py # CondUNet1D + AdaGN + cross-attention
│ │ ├── transformer.py # Decoder-only diffusion transformer
│ │ └── gaussian_diffusion.py # DDIM/DPMSolver inference pipeline
│ ├── datasets/ # 38D robot motion dataset loader
│ ├── trainers/ # DDPM training loop + EMA
│ ├── eval/ # MoCLIP, MSS, RTC evaluation
│ ├── utils/ # Motion processing, rotation, quaternion
│ ├── options/ # CLI argument parsers
│ ├── scripts/
│ │ ├── train.py # Training entry point
│ │ ├── generate_robot.py # Text-to-motion generation
│ │ ├── server_robot_ws.py # WebSocket inference server
│ │ ├── evaluation.py # Evaluation pipeline
│ │ └── compute_38d_stats.py
│ ├── tools/MoCLIP/ # MoCLIP evaluator training
│ ├── config/ # Diffusion scheduler & evaluator YAML
│ ├── docs/ # WebSocket API docs
│ ├── data/ # Mean_38d.npy, Std_38d.npy
│ └── checkpoints/ # Pretrained weights (downloaded)
├── deploy/ # Edge deployment (Sim2Real)
│ ├── src/
│ │ ├── deploy.py # Main controller (real + sim)
│ │ ├── sim2sim.py # MuJoCo simulator bridge
│ │ ├── text_to_motion.py # Cloud generator WS client
│ │ ├── policy.py # ONNX runtime inference
│ │ ├── observation.py # Observation construction
│ │ └── common/ # Joint mapper, PD helpers, math
│ ├── config/ # tracking.yaml, controller.yaml
│ └── assets/ckpts/ # ONNX policy checkpoint
└── scripts/ # download_weights.sh, serve.sh
@misc{jia2026echoedgecloudhumanoidorchestration,
title={ECHO: Edge-Cloud Humanoid Orchestration for Language-to-Motion Control},
author={Haozhe Jia and Jianfei Song and Yuan Zhang and Honglei Jin and Youcheng Fan and Wenshuo Chen and Wei Zhang and Yutao Yue},
year={2026},
eprint={2603.16188},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2603.16188},
}MIT — see LICENSE.