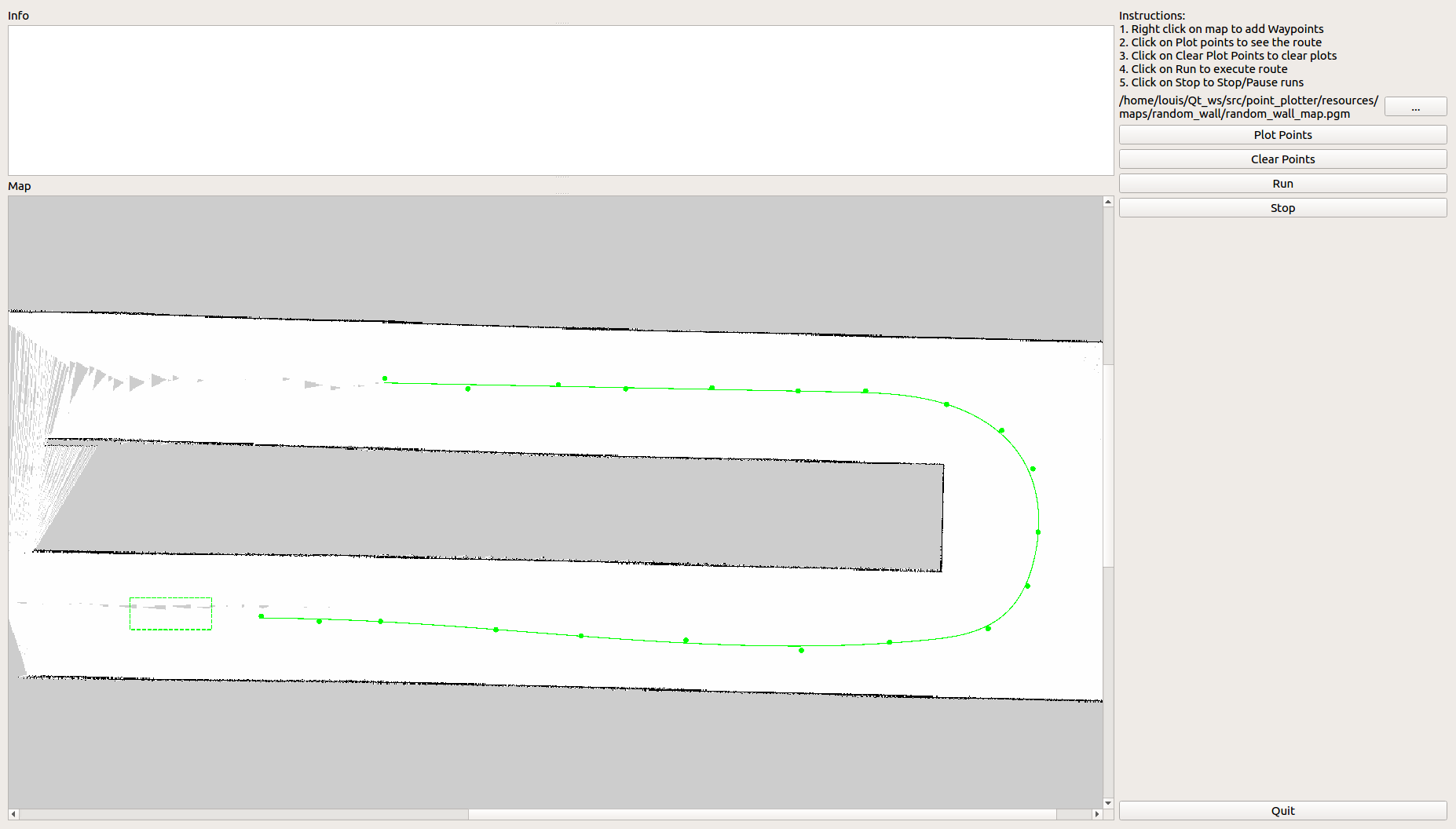
The point plotter package is to help user to add points and convert it to 2d goal nav message for the purpose of route following. It will open a map and the user can double click on the map to add points that you want the robot to follow. It will then link the points up using a curve fitting algorithm and send the goal location to the robot.
Install Qt5
Install cornucopia-lib
Install Eigen
Not needed but useful:
Install Qtcreator-ros plugin
cd ~/Documents
git clone https://github.com/matieum/cornucopia-lib
hg clone https://bitbucket.org/eigen/eigen/
cd cornucopia-lib
mkdir build
cd build
cmake ..
make
sudo make install
cd ~/Documents/eigen
mkdir build
cd build
cmake ..
make
sudo make install
Edit the following files Debugging.h AngleUtils.h VectorC.h
sudo nano /usr/local/include/Debugging.h
Change #include "Eigen/Core" -> #include "eigen3/Eigen/Core"
sudo nano /usr/local/include/AngleUtils.h
Change #include "Eigen/Core" -> #include "eigen3/Eigen/Core"
sudo nano /usr/local/include/VectorC.h
Change #include "Eigen/StdVector" -> #include "eigen3/Eigen/StdVector"
- clone repo into catkin workspace
catkin_make
- source workspace
rosrun point_plotter point_plotter
C++
ROS -- Framework in use
Qt -- UI Design
Cornucopia-lib -- Curve drawing
Louis Goh
This project is licensed under the MIT License - see the LICENSE.md file for details
matieum for Cornucopia-lib