NUDT - 《地面无人平台自主控制》 大作业:基于ROS通信的分布式多进程路径跟踪控制仿真系统
# ROS1 车辆纯点跟踪控制演示视频
通过百度网盘分享的文件:ROS1_Melodic exe.mp4
链接:https://pan.baidu.com/s/1uV2-DglfKa8K_crLT1waZQ?pwd=ltdy
提取码:ltdy目录 (Table of Contents) [TOC]
- 待上传8G的VMWare Ubuntu 18.04(带有 ROS1 Melodic 环境)
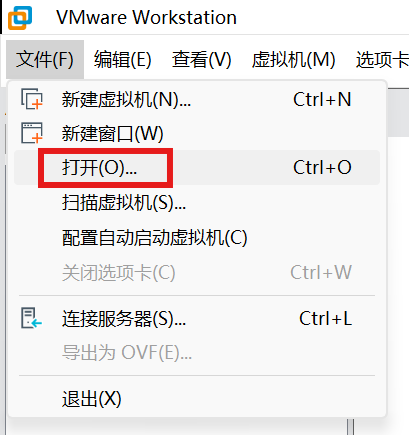
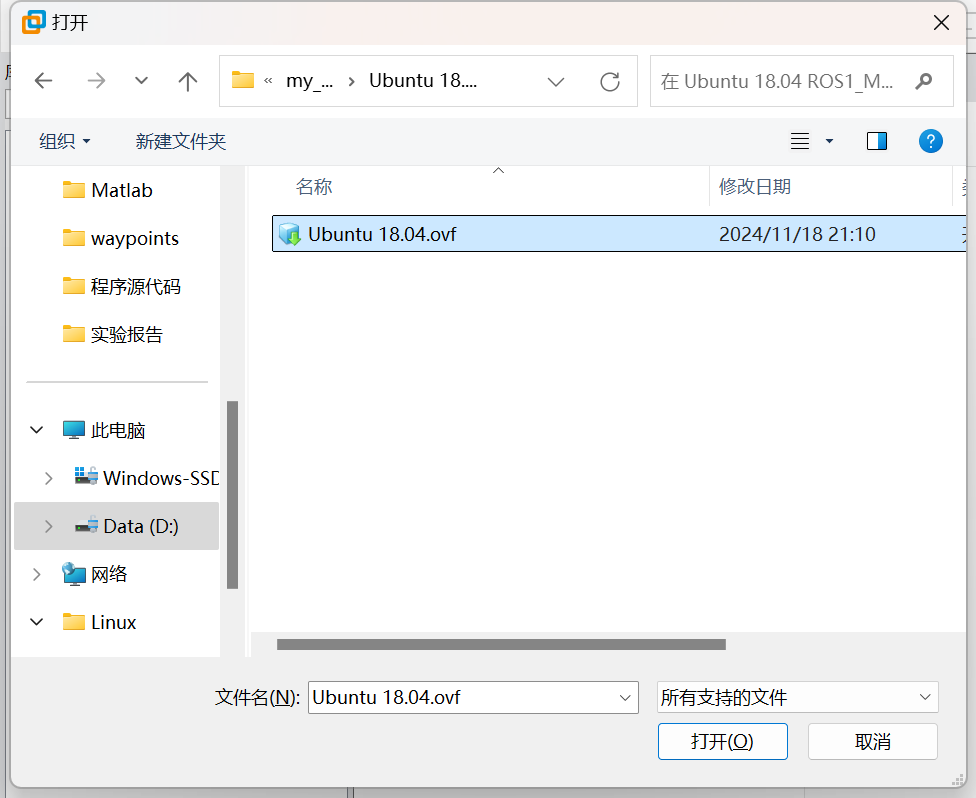
- VMware 17.01
- Ubuntu 18.04
- ROS1 Melodic
- Python 2.7.17(Ubuntu 18.04 自带)
注意 Ubuntu 和 ROS 版本的兼容性,ROS 的安装可以借助"鱼香 ROS"的脚本一键安装,可以省去很多不必要的麻烦
wget http://fishros.com/install -O fishros && . fishro安装好 Ubuntu 对应版本的 ROS 版本后,进行环境变量的配置(避免每次新开一个窗口加载 ROS 环境)
sudo gedit ~/.bashrc # 以管理员权限打开当前用户主目录下的 .bashrc 文件,使用 gedit 文本编辑器进行编辑# 在文件最后一行进行环境变量的配置
# >>> fishros initialize >>>
source /opt/ros/melodic/setup.bash
# <<< fishros initialize <<<
source ~/catkin_ws/devel/setup.bash
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/catkin_ws/source ~/.bashrc # 让修改立即在当前终端中生效,而不需要重新启动终端mkdir catkin_ws
cd catkin_ws
mkdir srccd ..
catkin_make # 在 catkin_ws 下roslaunch gazebo_ros empty_world.launch # 打开一个空白的世界
# 新开一个命令窗口
roslaunch car_model spawn_car.launch # 在空白世界加载小车模型rostopic list # 查看 ROS 下的 topic 列表
rostopic pub /smart/front_right_steering_position_controller/command std_msgs/Float64 "data: -0.5" # 用前右轮 topic 发布指令,对前右轮进行转角控制