This commit fixes the bug #76 #84
Conversation
[DQ_SerialManipulator] Added the property joint_types. Added the methods get_supported_joint_types(), check_joint_types() and, new methods to set and get the joint types. [DQ_SerialManipulatorDH, MDH] Updated the subclasses to comply with the modifications made in DQ_SerialManipulator.
|
|
||
| function set_joint_types(obj, joint_types) | ||
| % SET_JOINT_TYPES(joint_types) sets the joint types. | ||
| % 'joint_types' the vector that contains the joint types. |
There was a problem hiding this comment.
'joint_types' is a vector containing the joint types.
| obj.check_joint_types(); | ||
| end | ||
|
|
||
| function ret = get_joint_types(obj) |
There was a problem hiding this comment.
Change it according to my comment for the set_joint_type method.
| end | ||
|
|
||
|
|
||
| function ret = get_supported_joint_types(~) |
There was a problem hiding this comment.
Is there any reason for ignoring the arguments? (That is, for using ~)
There was a problem hiding this comment.
Hi @bvadorno, as discussed internally, I removed the '~'.
Current:
methods (Static, Access = protected)
function ret = get_supported_joint_types()
% This method returns the supported joint types.
ret = [DQ_JointType.REVOLUTE, DQ_JointType.PRISMATIC];
end
end
[DQ_SerialManipulator.m] Removed the '~' from the method signature. Furthermore, I defined as a static method. [DQ_SerialManipulatorDH, MDH] Changed method get_supported_join_types() to comply with the modification made in DQ_SerialManipulator.
[DQ_SerialManipulator, DQ_SerialManipulatorDH, MDH]
|
|
||
| function ret = get_joint_type(obj, ith_joint) | ||
| % GET_JOINT_TYPE(ith_joint) returns the joint type of the ith joint. | ||
| % GET_JOINT_TYPE(ith_joint) returns a vector containing the joint types. |
There was a problem hiding this comment.
@juanjqo, is get_joint_type returning a vector? I thought we were sticking with your initial implementation, in which get_joint_type would return just a double.
There was a problem hiding this comment.
@bvadorno I was a typo. You're right, get_joint_type returns a double.
|
Hi @juanjqo, there is just one outstanding clarification before merging this pull request. |
@dqrobotics/developers
Hi @bvadorno,
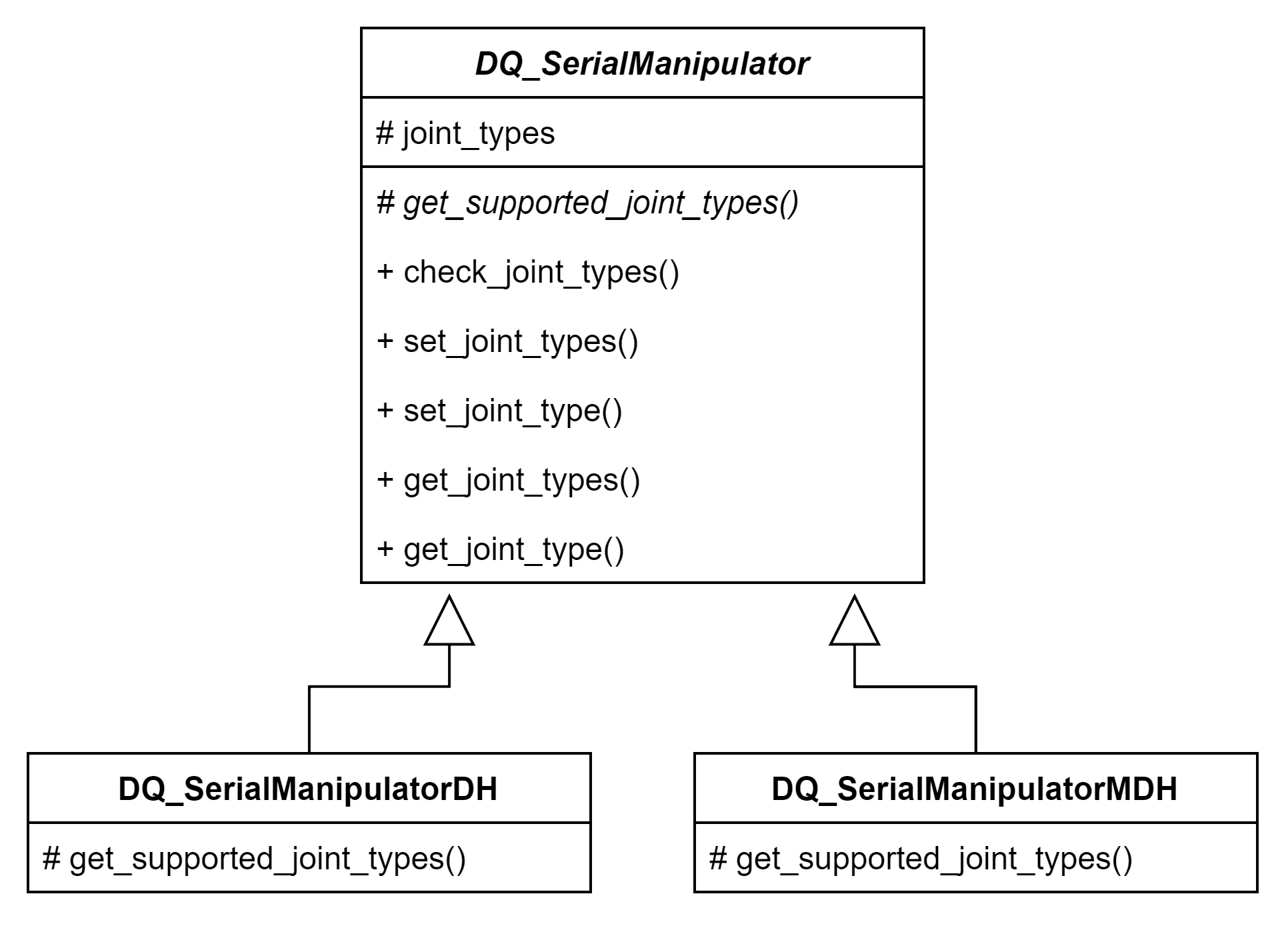
This PR proposes the following modifications to fix #76 :
typefrom subclassesDQ_SerialManipulatorDHandDQ_SerialManipulatorMDH. Added the protected propertyjoint_typesinDQ_SerialManipulator. Motivations:obj.joint_typesis a property common to all subclasses, likeobj.n_joints.set_joint_types(and get_joint_types, both added in this PR) there is no need to keepobj.joint_typesas a public property. (Currently, the user can freely get and set the propertyobj.type.UML:
Example of use:
Minimal example used in #76
Output:
Error using DQ_SerialManipulator/check_joint_types Unsupported joint types. Use valid joint types: DQ_JointType.REVOLUTE, DQ_JointType.PRISMATIC. Error in DQ_SerialManipulator/set_joint_types (line 146) obj.check_joint_types(); Error in DQ_SerialManipulatorDH (line 196) obj.set_joint_types(A(5,:)); Error in untitled2 (line 30) ax = DQ_SerialManipulatorDH(ax18_DH_matrix)Best regards,
Juancho