Coordinate Spaces
It's important to understand the three different coordinate systems we use when talking about robots in Tharp.
Joint coordinates define the end effector position by the angle of each joint and the length of each segment in a chain. In the images below we are setting the coxa servo to 1°, the femur to 45° and the tibia to -115°.
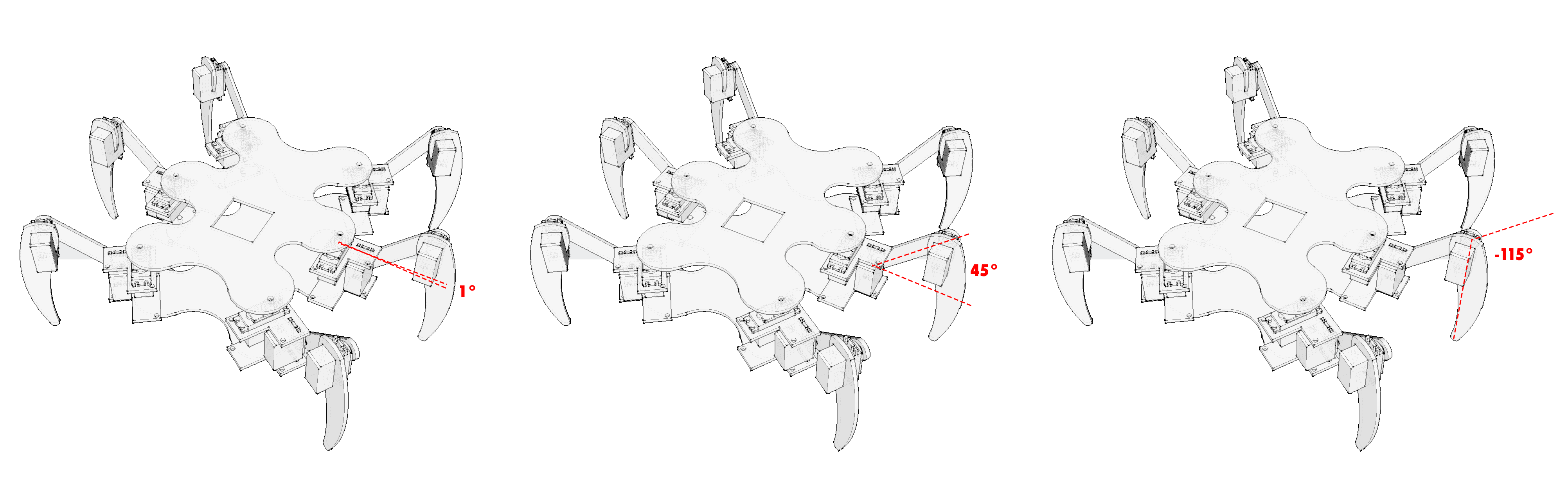
Using these angles and the segment lengths it is possible to compute the end effector position using forward kinematics but this is not a reasonable pattern for defining complex behaviors like walking. We need angles for our revolute joints of course, but our brains are much better at reasoning about X, Y, Z coordinates in a 3D coordinate system.
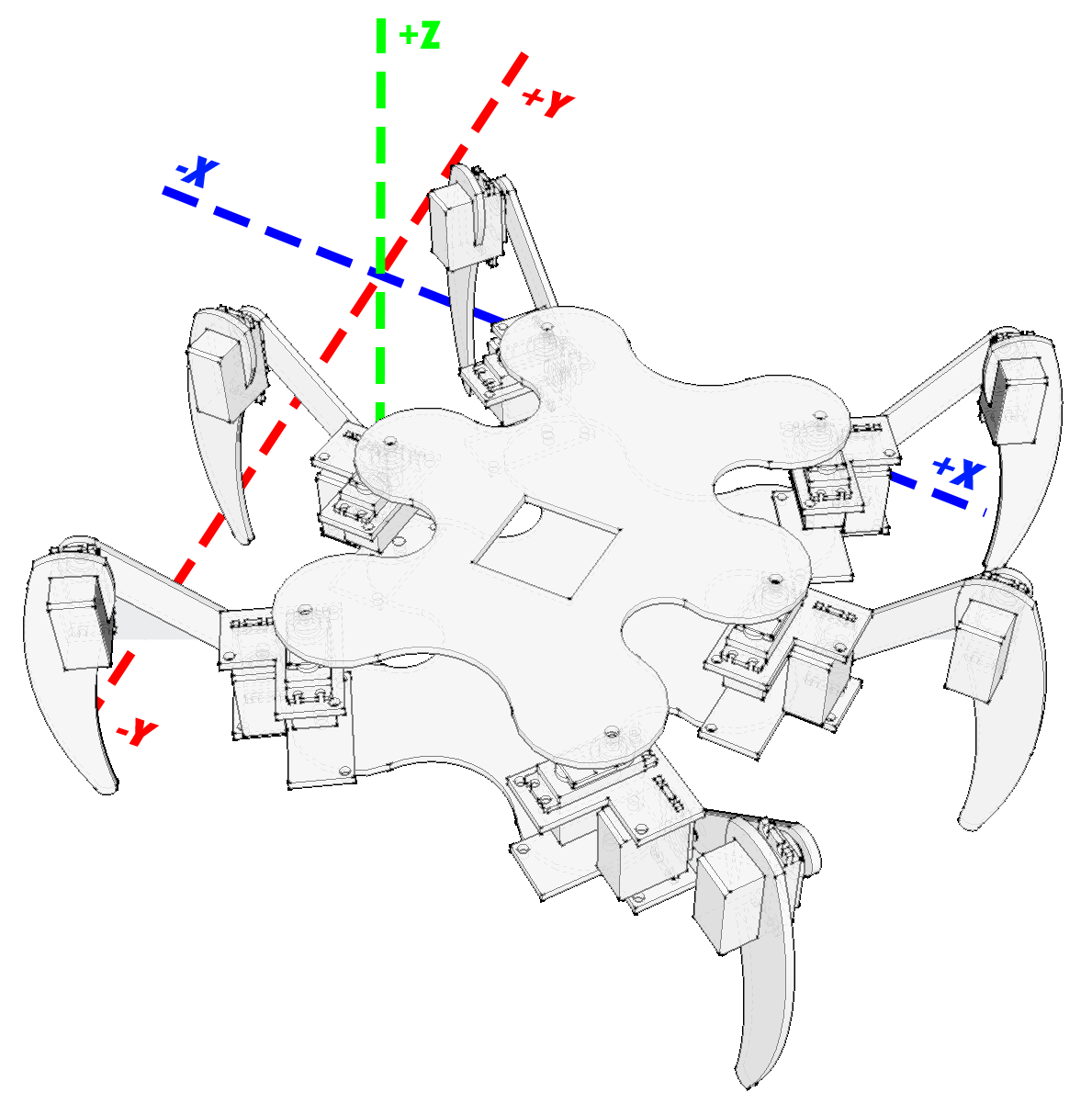
Global coordinates define a position using an X, Y and Z value (a 3-tuple) on a coordinate grid whose origin is at some arbitrary point in the environment our robot moves within.
Next: Assemble Your Robot