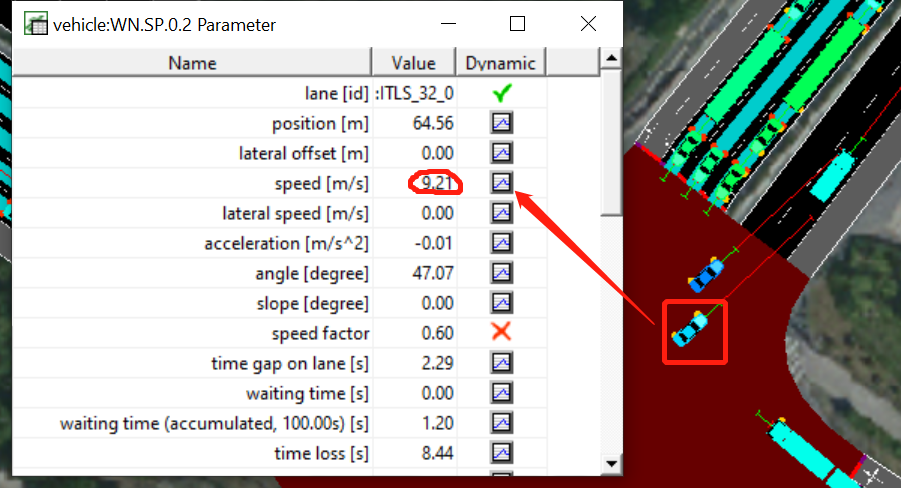
Hello! I recently researched the lateral interferences of bicycle/moped lanes, and it came up with some problems while adding these lanes to the previous model. As demonstrated by the following figure, the forward space of Vehicle WN.SP.0.1 was clearly empty, and it would be safe for it to finish passing through the intersection area.
However, its speed critically dropped, and the brake gap shortened, as shown by the following figure. And the vehicle would then stopped at its current position and caused a deadlock in the intersection.
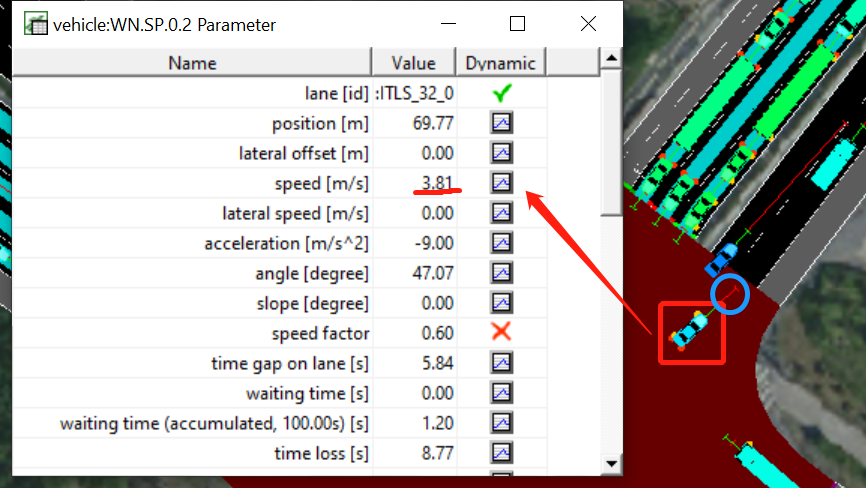
I'm currently using IDM car-following model with tau=1.1 and delta=3.8 for this specific type of vehicle. I disabled the non-motorized vehicle flows, but the problem still existed. What might be the cause of the problem above?
Hello! I recently researched the lateral interferences of bicycle/moped lanes, and it came up with some problems while adding these lanes to the previous model. As demonstrated by the following figure, the forward space of Vehicle WN.SP.0.1 was clearly empty, and it would be safe for it to finish passing through the intersection area.
However, its speed critically dropped, and the brake gap shortened, as shown by the following figure. And the vehicle would then stopped at its current position and caused a deadlock in the intersection.
I'm currently using IDM car-following model with tau=1.1 and delta=3.8 for this specific type of vehicle. I disabled the non-motorized vehicle flows, but the problem still existed. What might be the cause of the problem above?