2020 Embedded System Final Project
107062228 陳劭愷
https://github.com/justin0u0/arduino-auto-follow-car

最終完成圖(側邊)

最終完成圖(正面)
實作一台跟隨照明自走車,功能包括:
- 當物體直線遠離車體時,自走車需要跟上物體的移動。
- 當物體過於靠近車體時,自走車需要後退。
- 當物體移動到車體右前方時,自走車需要右轉。
- 當物體移動到車體左前方時,自走車需要左轉。
- 在不同的亮度環境下提供不同強度的光線照明(光線越暗、照明越強)
- 在剛啟動時,自動旋轉以找尋物體跟隨。
- 如果超過 10 秒沒有偵測到範圍內有物體,則進入休眠模式。透過 Button Interrupt 的方式將其喚醒。
L298n 上提供了一些 Pin 來方便的對兩顆馬達 Motor A、Motor B 進行操作。
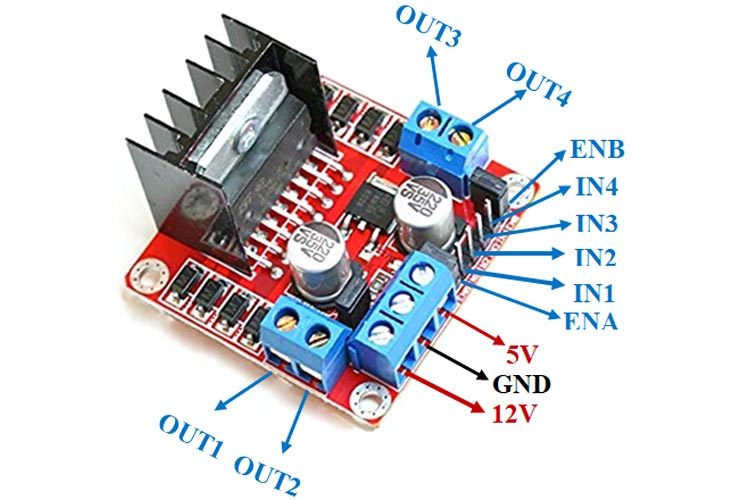
L298n 示意圖 Image source: https://components101.com/modules/l293n-motor-driver-module
下表介紹如何透過 L298n 控制 Motor A、Motor B:
接下來介紹如何使用 IN1、IN2、ENA 控制 Motor A 的轉速、轉向:
而事實上,ENA 是可以透過電壓大小來控制 MotorA 轉速,也就是 ENA 的電壓越高,則 Motor A 轉速越高。因此可以透過 PWM 的方式控制電壓大小來控制馬達轉速。
IN3、IN4、ENB 控制 Motor B 的方式與 IN1、IN2、ENA 控制 Motor A 的方式相同,就不再多介紹。
超聲波可以幫助偵測前方物體的距離,使用的是 HC-SR04 模組。

超聲波模組示意圖 Image source: https://lastminuteengineers.com/arduino-sr04-ultrasonic-sensor-tutorial/
距離計算方式如下:
若設超聲波聲音速度
因此距離
在此 Project 中紅外線模組用於感應左前方、右前方有沒有物體存在,來判別應該要往哪一個方向轉向。

紅外線避障模組示意圖 Image source: https://www.taiwansensor.com.tw/product/紅外線避障模組-避障-近接開關-感應距離可調/
紅外線模組上的旋鈕可以調整檢測距離,順時針轉可以增加檢測距離。
在此 Project 中使用 LED 於照明功能。並使用 PWM 來控制 LED 亮度。
在此 Project 中使用光敏電阻來接收照明亮度,以此控制 LED 亮度大小。
L298n 的供電使用 9V 鹼性電池供電,因為若使用 Arduino 的 5V 來供電,雖然 L298n 上的指示燈可以正常運作,但是馬達沒有足夠的力度轉動。
Arduino 板則是使用行動電源供電,因為車體用 USB 連接著電腦就無法四處移動。
這次 Project 採用 OOP 的方式來撰寫 Code,因此由上而下,先介紹各個 Class 的用途,再介紹三個 FreeRTOS 的 Task,最後是一些 ISR、功能函數、和 Arduino 的 Setup、Loop。

在此我們宣告了的 Class 的 Prototype,定義了一些 state、全域共享變數以及 Locking 用的變數。

Wheel 控制 Motor 的轉動方向以及轉速,初始化時我們帶入兩個 IN 和一個 Enable 的 Pin 腳
位,預設 Motor 為停止狀態以及轉速 140,並提供以下函數:
Wheel::RotateFront→ 輪子往前轉動。Wheel::RotateBack→ 輪子往後轉動。Wheel::Stop→ 輪子快速停止。Wheel::SetSpeed→ 使用 PWM (analogWrite) 控制 Enable Pin 的輸出電壓,因此速度的範圍是在 0 ~ 255 之間,用來控制輪子的轉速。

Car 控制車體的運行,因此可以知道一個車體必須有兩個 Wheel,初始化時,帶入兩個輪子的兩個 IN 以及一個 Enable 的腳位,將兩個 Wheel 進行初始化。提供以下函數方便車體運行的操作:
Car::Forward→ 前進即是兩個輪子都前進。Car::Backward→ 後退即是兩個輪子都後退。Car::Left→ 向左轉即右輪前進左輪不動。Car::Right→ 向右轉及左輪前進右輪不動。Car::Stop→ 停止即兩個輪子快速停止。Car::SetSpeed→ 設定車速即設定兩輪轉速。
對於上述的前 5 個函數,為了避免連續呼叫兩次相同函數而還要再次多呼叫函數,使用一個私有變數 carState 來記錄上一次被呼叫的是哪一個函數,並只有在呼叫了與 carState 不同的狀態時才執行函數。

UltraSonic 控制超聲波的運作,在初始化時傳入 Trig、Echo 的腳位。提供兩個函數方便操作:
-
UltraSonic::Measure→ 進行一次超聲波量測並回傳結果。在前面有介紹到,要開始量測需要對 Trig Pin 輸出 ≥ 10ms 的連續高電壓,因此先將
trigPin設成LOW,經過 2ms 後即輸出 10ms 的高電壓,利用pulseIn函數得到echoPin上連續高電壓的時間,計算出距離(cm)並回傳。 -
UltraSonic::GetSensorState→ 多次計算距離後取平均並回傳四種結果:太近TOO_CLOSE、適中APPROPRIATE、太遠TOO_FAR以及找不到物體NOT_FOUND。因為超聲波的量測會有誤差,因此我採用量測 10 次取平均值的方式,平均後再回傳結果。

**Led** 控制 LED 亮度,在初始化時傳入 LED 腳位。提供一個函數方便操作:
Led::SetBrightness→ 設定 LED 亮度,使用的是analogWrite來做到 PWM,因此亮度的範圍在 0 ~ 255 之間。

Infrared 控制紅外線,在初始化時傳入紅外線腳位。提供一個函數方便操作:
Infrared::Detect→ 偵測紅外線是否有偵測到物體。

在 sensorControlTask 中,首先偵測超聲波前是否有物體,使用 UltraSonic::GetSensorState 來取得新的 state。若超聲波並沒有找到任何物體,則物體可能是移動到車體的左前或是右前方,因此對兩個紅外線都進行偵測,如果有偵測到的話則知道新的狀態可能是物體在左前側 TOO_LEFT 或是在右前側 TOO_RIGHT。最後取得的新狀態 newState 若與上一個狀態 sensorState 不同,則告知讓 carControlTask 運行。
因為 carControlTask 中會等待 sensorStateUpdated 這個 binary semaphore 有資源時才執行,因此決定何時讓 carControlTask 運行是 sensorControlTask 的重要工作。可以看到只有兩個情況下要讓 carControlTask 運行,一是當 sensorState 被改變,因此車子的行為也應該要改變;二是在 suspendCarFlag 為 true 時,這個 flag 是用來告知要進入休眠模式的,詳細會在後面介紹。

在 lightControlTask 中,要偵測光敏電阻的亮度,並且設定 LED 的亮度。
suspendLightFlag 為要進入休眠模式時會被設成 true,當進入休眠模式時,將 LED 全數關閉並將自己這個 task 暫時 suspend。

在 carControlTask 中,上面有提到,必須等待 sensorControlTask 告知偵測物體狀態有所改變時,才進行操作,因此使用 xSemaphoreTake 來等待 sensorStateUpdated 這個 signal。
接著就可以利用全域共享變數 sensorState 來得知現在物體與車體的狀態是如何的。根據每一種不同的狀態,即可對車子進行操作。例如:太靠近 TOO_CLOSE 的話可以 Car::Backward 來後退。這裡就不多贅述。
當物體沒有被偵測超過 10 秒應該要進入休眠模式,因此在 NOT_FOUND 時,將 Timer1 的計數器 Reset,並且將 timerCount 從 -1 變成 0。timerCount 在 -1 時代表不需要計時,所以平時 timerCount 應該要是 -1,這部分會在底下再說明。
當 suspendCarFlag 被設起,代表應該要進入休眠模式,因此將車子進入停止狀態,同時 suspend sensorControlTask 以及自己 carControlTask。

本次 project 中使用 Timer1 來計時 10 秒沒有偵測到物體後進入休眠模式。因為 Timer1 的 prescaler 最大到 1024 而已,而 Arduino 的時脈為 16M,並且 Timer1 使用的 register 為 16 bits 的:
可以知道就算用上最大的 prescaler,一次的 Timer1 Overflow 都還是無法計算到 10 秒的,因此使用了 timerCounter 來計算 10 次的一秒取代,並且將一次的 Timer1 Interrupt 時間設為 1 秒。
上面有提到當 timerCounter == -1 時代表不計時,因此當 timerCounter ≥ 0 時將 timerCounter 加一,當加到 10 的時候,代表經過了 10 秒了,因此將 suspendLightFlag 以及 suspendCarFlag 都設成 true。

wakeUp 函數用來當做按鈕的 Interrupt Service Routine,當進入休眠模式且按鈕被按下時,將被 suspend 的 task 都喚醒,因為是在 ISR 內使用,因此要用的函數是 xTaskResumeFromISR 而非 vTaskResume。

在初始運行時,我希望車子可以旋轉以找尋物體,因此直接讓車子不停向右,並且直到超聲波偵測到物體後直接離開函數。
函數 initialSearch 即是用來幫助完成這件事。

在 setup 中,首先設定 Timer1,設定方法在註解已經註明,就不多加贅述。再來設定按鈕是用來觸發 ISR wakeUp 函數用,完成後呼叫 initialSearch 函數開始找尋物體。最後物體發現後,建立三個 Tasks sensorControlTask、carControlTask 以及 lightControlTask。
- 在一開始測試馬達運轉時,明明提供了 9V 的電池,但是馬達卻無法克服最一開始的靜摩擦力開始轉動。到最後將 9V 的碳鋅電池換成 9V 的鹼性電池 就成功的運轉了。
- 原本設計的休眠模式是將 Arduino 放到 Low Power Mode,再使用 button interrupt 將其喚醒,但是沒想到 Arduino low-power 的 library 不能跟 FreeRTOS 的 library 一起使用,最後只好改了其他方式來呈現休眠模式。