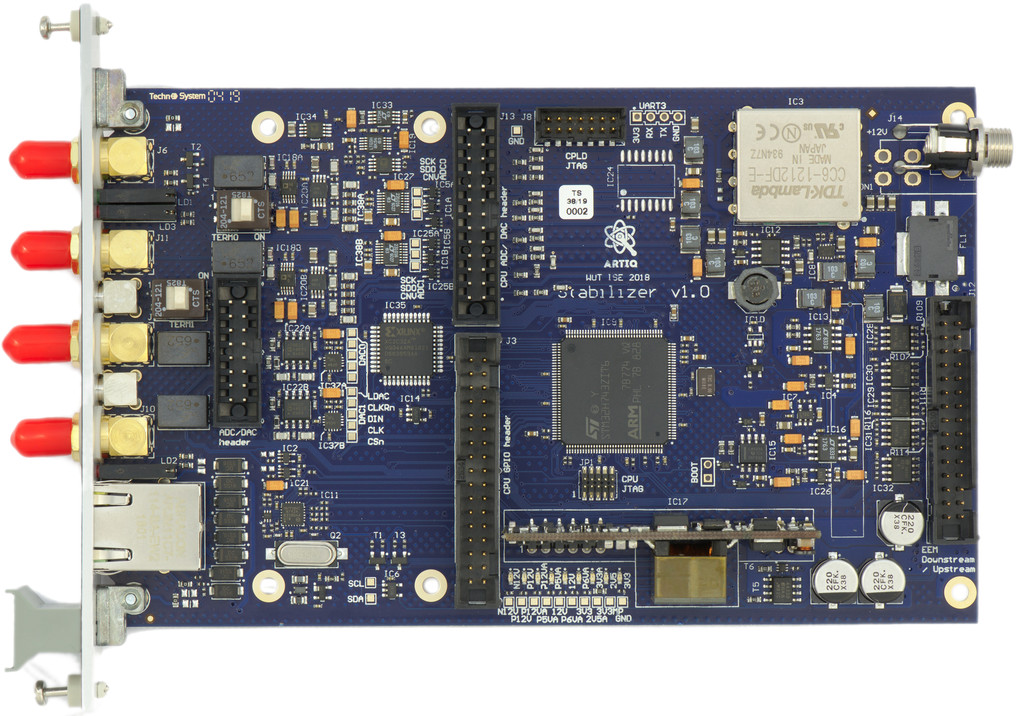
Stabilizer Firmware Applications Check out the Documentation for more information on usage, configuration, and development. Hardware
{kind=link}