This code loads sensors' data, combined analysis readings from encoder, 2D lidar and FOG sensor, and generate map of surrounding environment of robot.
- create "sensing_data" file
- change the parameter in map_init.py
- add sensors' data file to directory
- run main.py
Encoder: 2 * n, left wheel, right wheel
FOG: 3 * n, delta angle in x, y, z
2D-Lidar: 286 * n, obstcle location in different directions
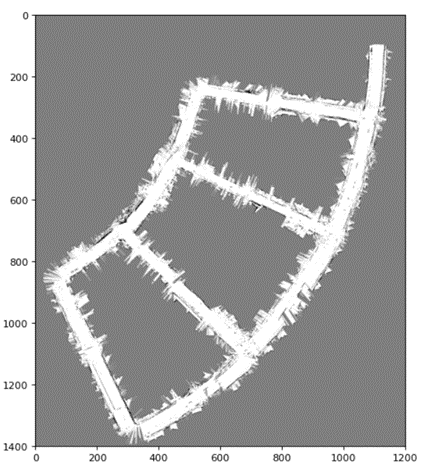
SLAM mapping