| Items | quantity |
|---|---|
| RoboMaster M3508 P19 | 4 |
| RoboMaster C620 | 4 |
| RoboMaster M2006 P36 | 1 |
| RoboMaster C610 | 1 |
| Servo (any) | 1 |
| Ranging sensor | 2 |
| Photoelectric sensor | 1 |
| Grayscale Line Tracking Sensor | 1 |
| omni wheel | 4 |
| STM32F407 core development board | 1 |
| JTA1050 CAN | 1 |
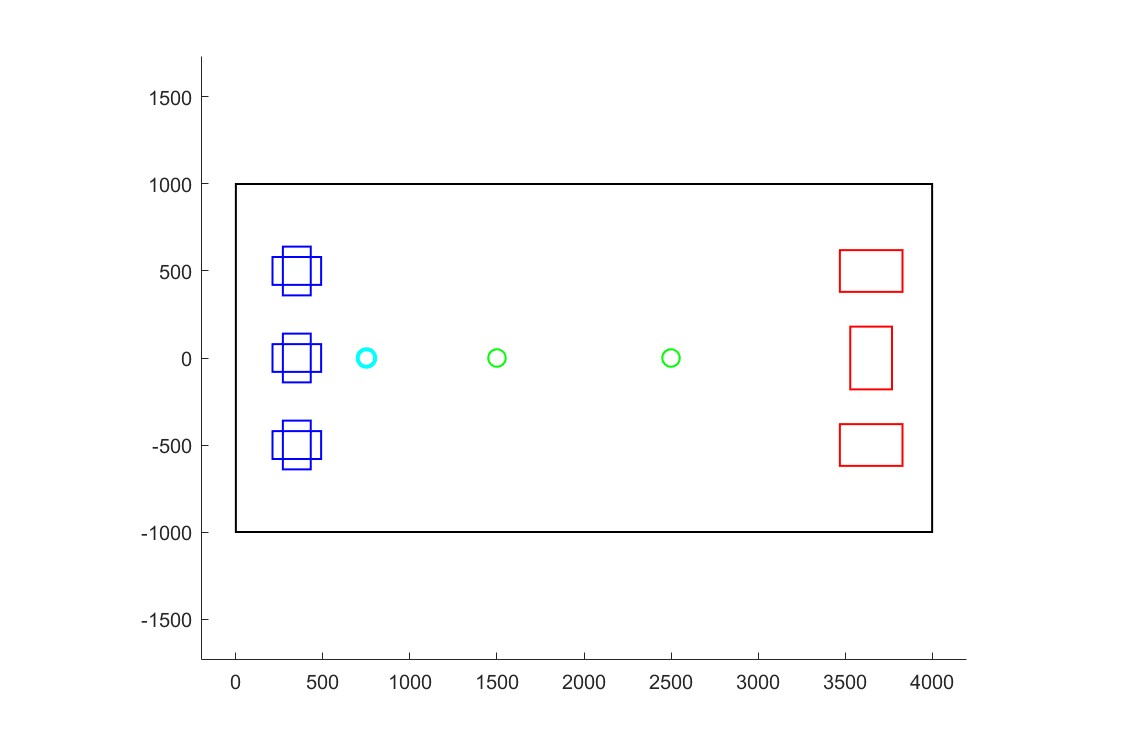
The Motor_can code is used to control the Intelligent handling trolley to move and carry the boxes.