[Preception] Apollo 7.0 Close Perception module makes planning and prediction modules not working #14802
Description
Hi team,
I am using Apollo r7.0.0 to test vehicle crossover static NPC. Using perception module, the system works fine.
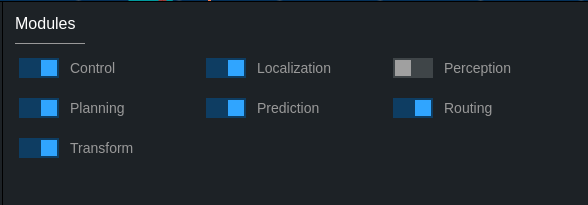
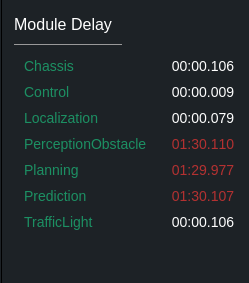
But when I closes the perception module and want to use obstacle_gt to test the crossover, it makes planning and prediction module not working as below shows
And I tried to open the planning module manually but find with this error
E0302 16:53:17.438055 16491 reference_line_provider.cc:205] [planning]Routing is not ready.
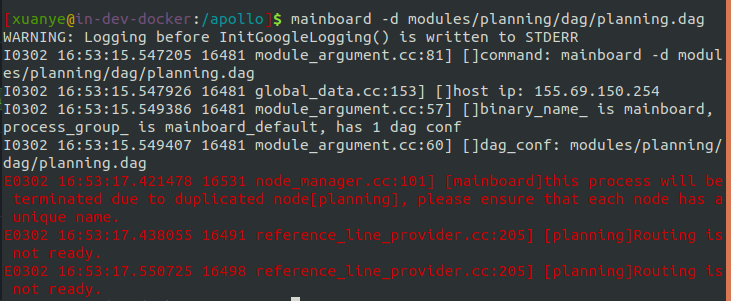
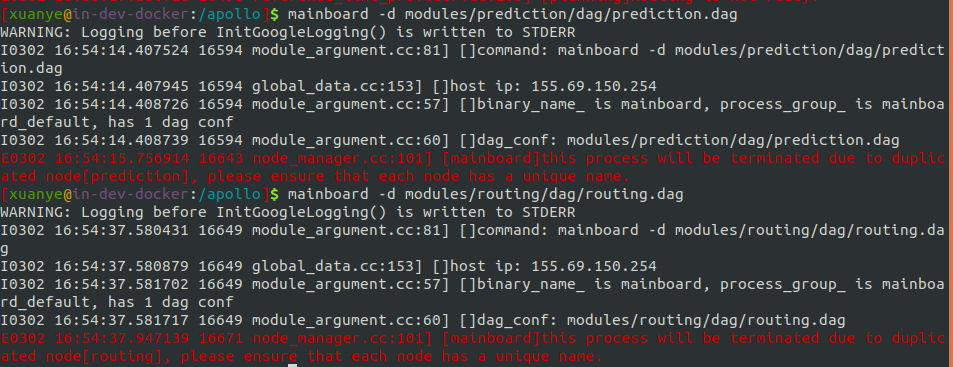
And the prediction and routing I thought was running.
And in the simulator, ground truth sensor works fine. The ground truth ID is e3fef197-9724-48ec-b98e-c5a0892d09c4.
And the vehicle ID is 8e776f67-63d6-4fa3-8587-ad00a0b41034. Vehicle is for apollo 6.0.

Any advice on this problem?