20 Dec 2025: Removed old motor driver library, replaced it with custom "BR_DRV8833" included in the code
20 Dec 2025: Replaced Tof library with Adafruit library
20 Dec 2025: Updated the code to run with ESP core 3.0
| Component | Quantity | Description |
|---|---|---|
| ESP32 Dev Board | 1 | Main microcontroller (ESP32-WROOM-32 Devkit) |
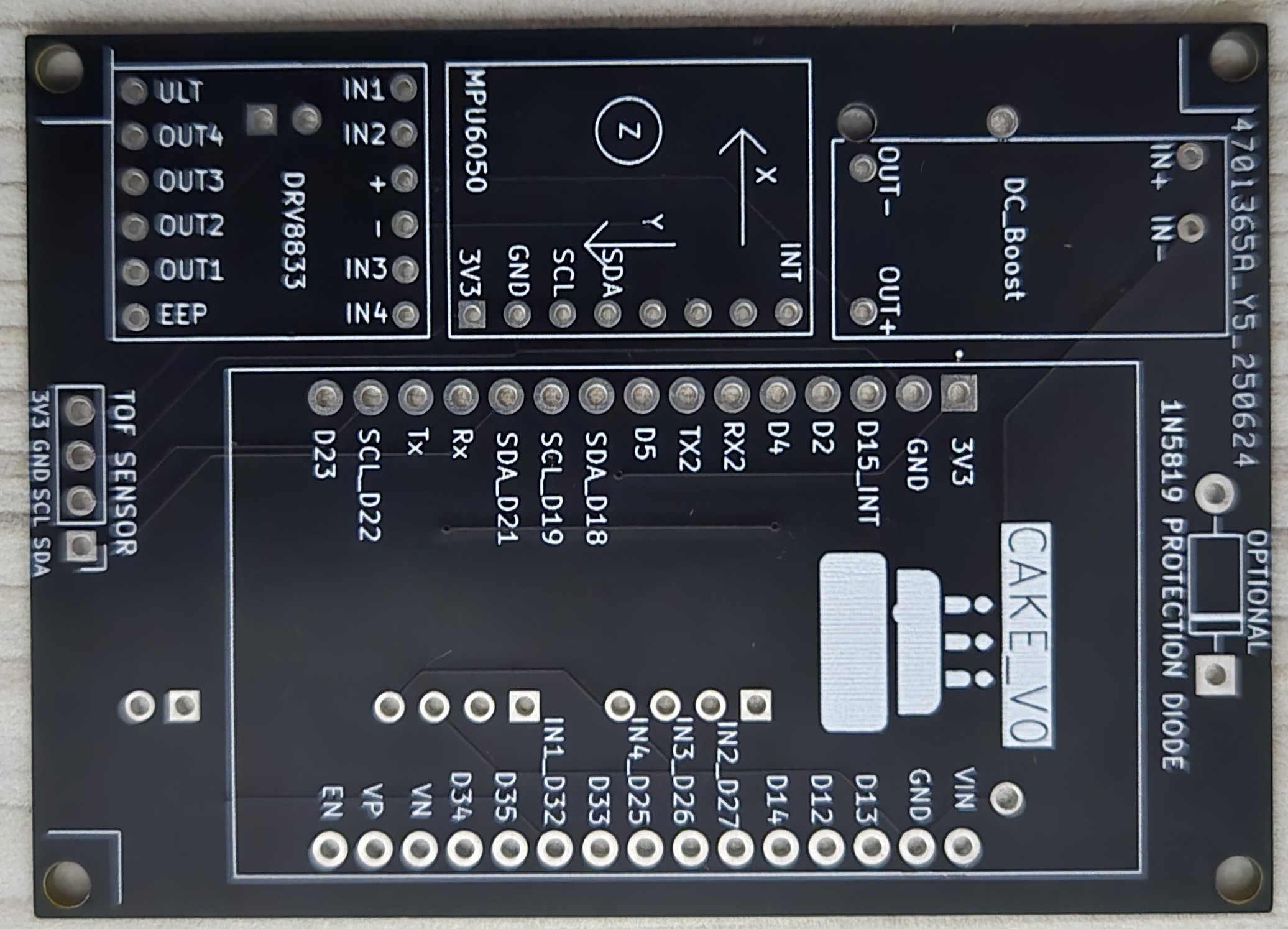
| DRV8833 Motor Driver | 1 | Dual motor driver breakout board |
| N20 Gear Motor | 2 | Compact DC motors for precise actuation |
| AS5600 Encoder | 2 | Magnetic rotary encoder for motor position feedback |
| MPU6050 Module | 1 | 6-axis IMU (accelerometer + gyroscope) |
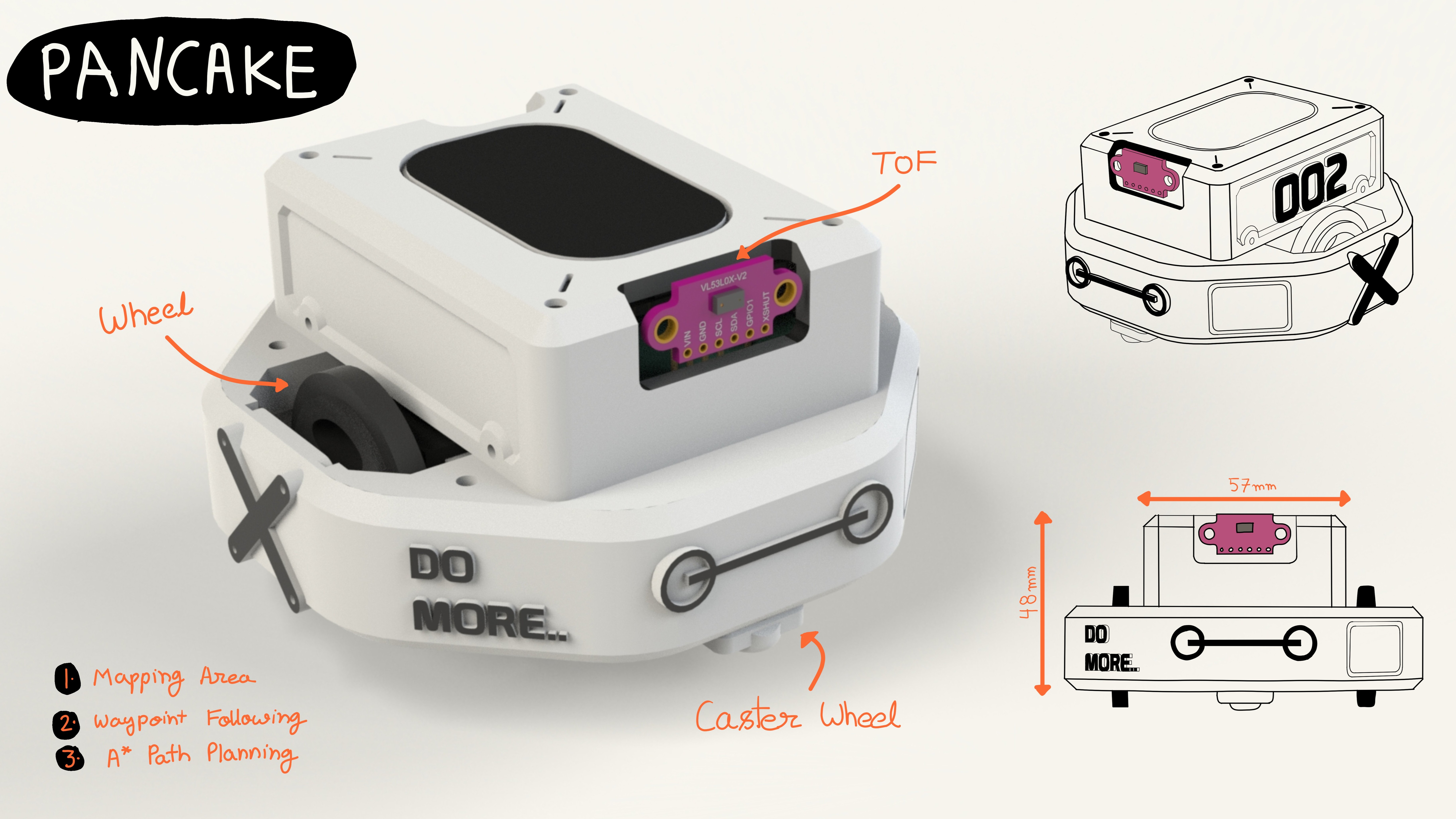
| VL53L0X ToF Sensor | 1 | Time-of-flight distance sensor for obstacle detection |
| DC Boost Module | 1 | MT3608 voltage booster (e.g., 3.7V to 5V) |
| 16340 Battery | 1 | Rechargeable Li-ion battery for powering the system |
| Battery Holder | 1 | Compatible holder for 16340 battery |
| 1N5819 Diode | 1 | Schottky diode for reverse polarity protection |
| Male Pin Headers 90 degree | 40 pins | 2.54mm pitch, for module and I/O connections |
| Female Pin Headers | 40 pins | 2.54mm pitch, for module and I/O connections |
| 2mm x 10mm Screws | 20 | For mouting PCB and motors |
| Wires (Assorted) | — | Flexible hookup wires for connections |
| Soldering Iron Set | 1 | Basic soldering kit for assembly and repair |
| 3D Printed parts | 1 | 3D pritned robot parts |