
Hello! I am Nguyen Phu Huu (born in 2006).
I am currently a sophomore majoring in Electronics and Telecommunications at HCMUTE (Ho Chi Minh City University of Technology and Education).
Beyond the classroom, I am deeply involved in research and development at the AIoT Semiconductor Lab ("From LAB to LIFE").
🎯 My Technical Mission:
My passion lies in the Full IoT Stack. I don't just want to write code; I want to build the entire system — from the silicon chip to the cloud dashboard.
- 🔭 Focusing on: High-performance Embedded Systems (STM32, ESP32) & RTOS.
- 🌱 Learning: Professional PCB Design & Cloud Connectivity.
- ⚡ Fun fact: I love turning caffeine ☕ into firmware 💾 and blinking LEDs 💡.
💻 Programming Languages
🔌 Embedded & Hardware
☁️ IoT & Connectivity
⚙️ Tools & IDEs
|
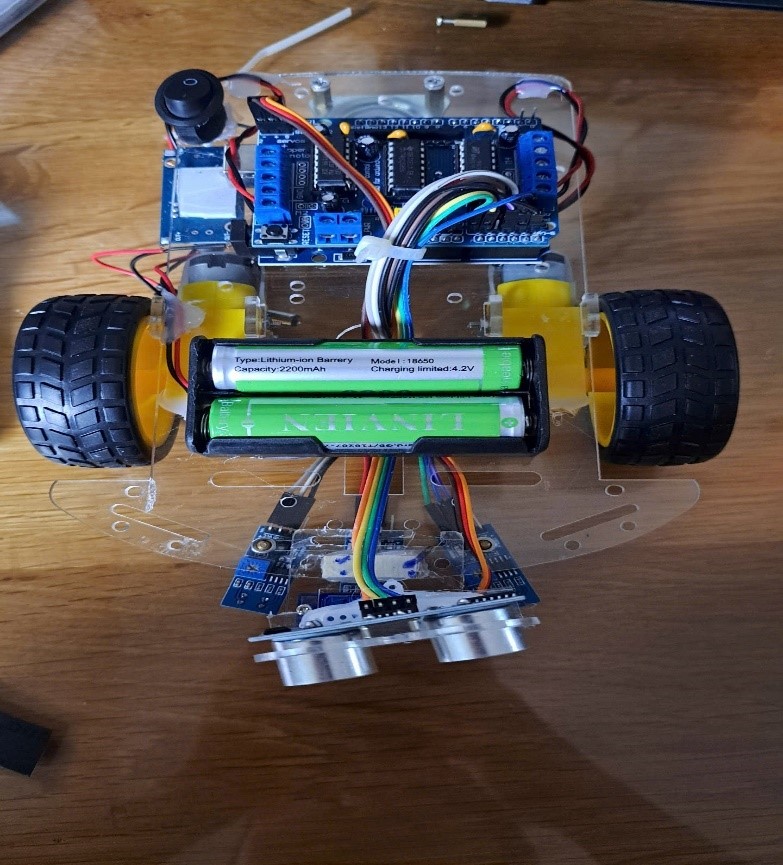
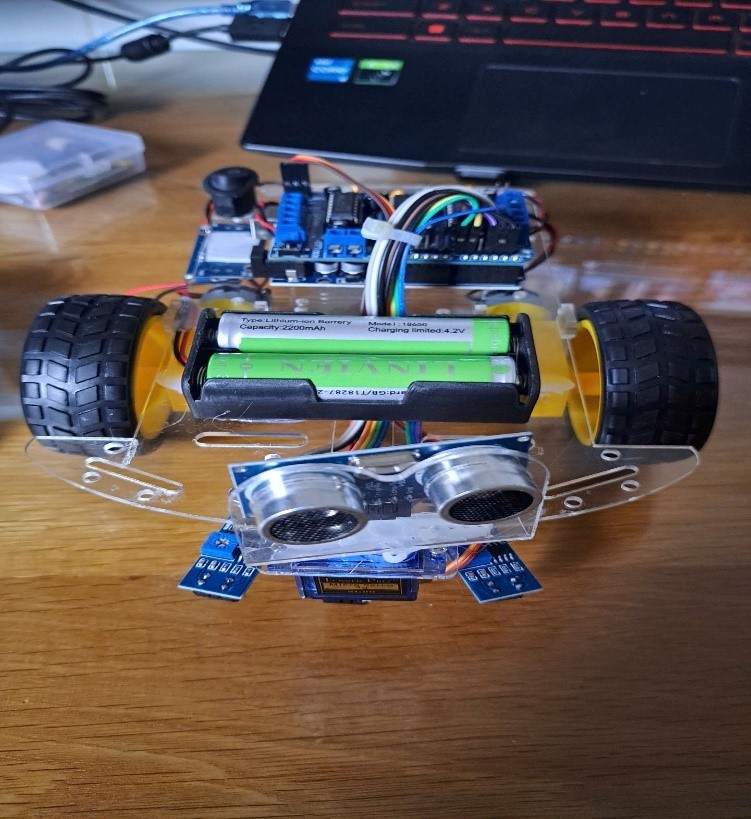
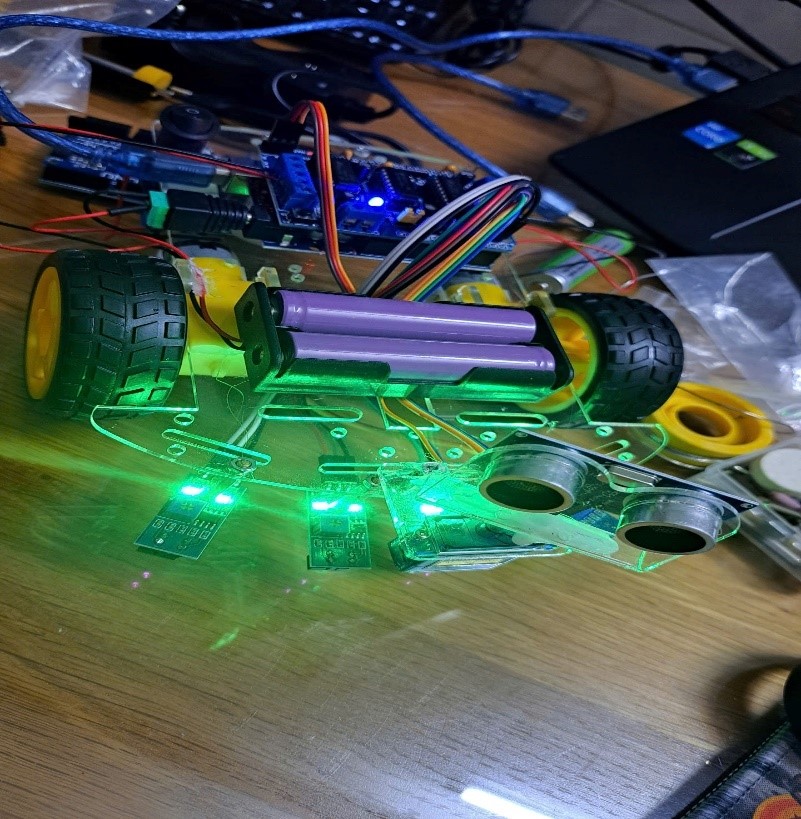
Capstone Project (Freshman Year)
🛠 Technical Highlights:
|
|