Home
Welcome to the documentation wiki for the NeuroEvolution of Dynamic Neural Field Controllers for Human–Robot Collaboration project.
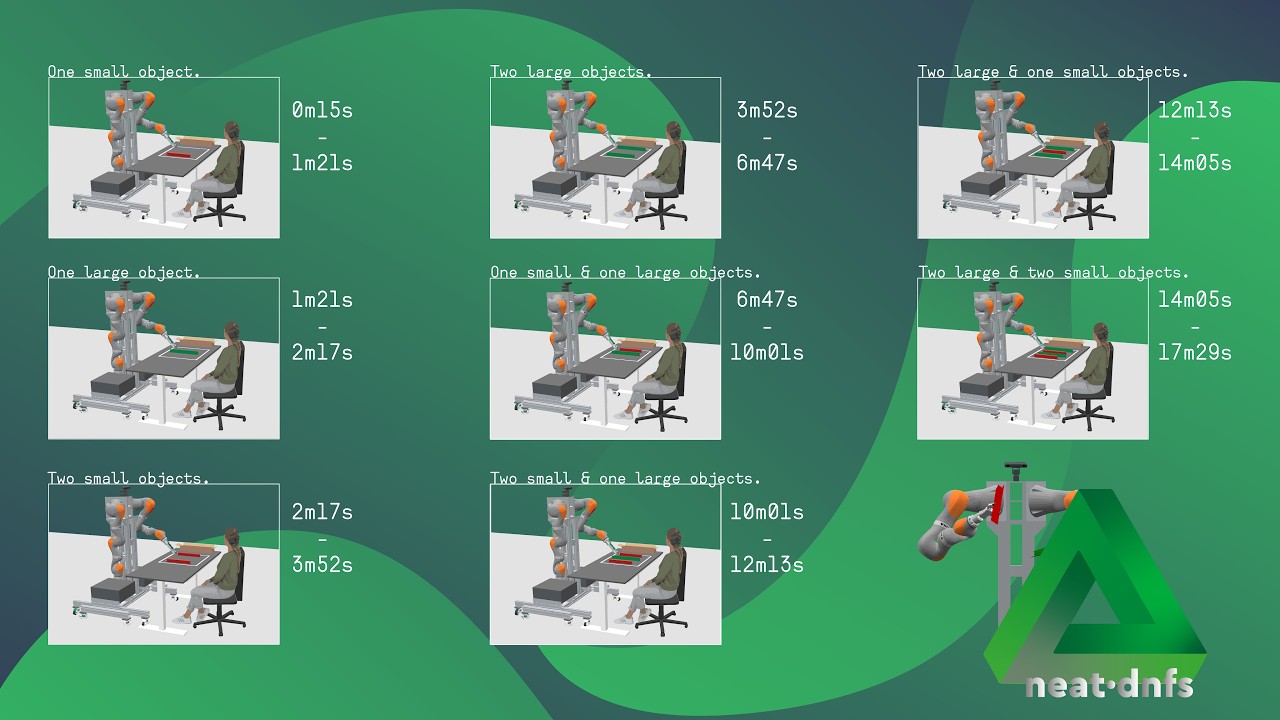
This repository contains the experimental setup used for evolving Dynamic Neural Field (DNF) control architectures that enable adaptive human–robot collaboration in a collaborative packaging task using a KUKA LBR iiwa 14, OnRobot RG2 gripper, ZED 2i camera, and a Pan–Tilt Unit (PTU).
The system is built on ROS 2 Humble and MoveIt 2, and supports both simulation (Gazebo) and real hardware deployment.

This wiki contains the following documentation:
| Page | Description |
|---|---|
| Home | Overview of the project and documentation structure |
| Quick Setup | Minimal steps to start the robot and run the experiment |
| Available Control Nodes | Description of all ROS control nodes (including debugging and testing nodes) |
| OnRobot Setup | Detailed setup and usage of the OnRobot RG2 gripper |
| KUKA Setup | Detailed setup for the KUKA LBR iiwa robot and MoveIt |
| PTU | Pan–Tilt Unit setup and control |
| ZED 2i | Camera setup, ROI configuration, and object/hand tracking |
| Detailed Setup | Full system explanation and architecture overview |