You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
The function lqr still exists for systems as inputs, where it's clear from the system type which version to call. For matrix inputs, we now require an explicit c/d.
The c/d has been put at the end of the function name instead of in the beginning to be consistent with MatrixEquations and to aid discovery.
lyap still exists without a c in the end since the function belongs to LinearAlgebra.
This is an automated message.
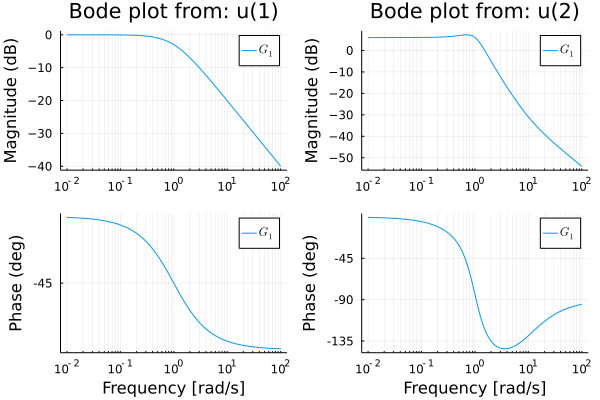
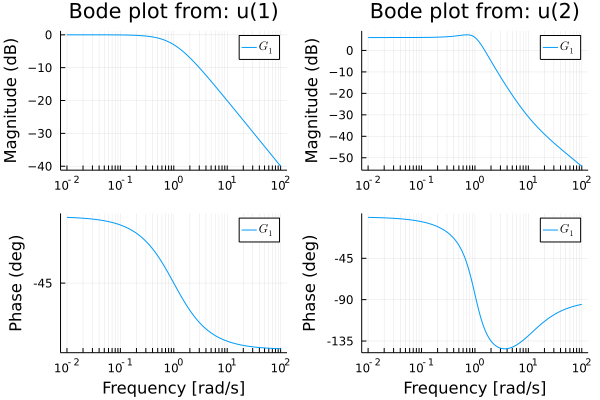
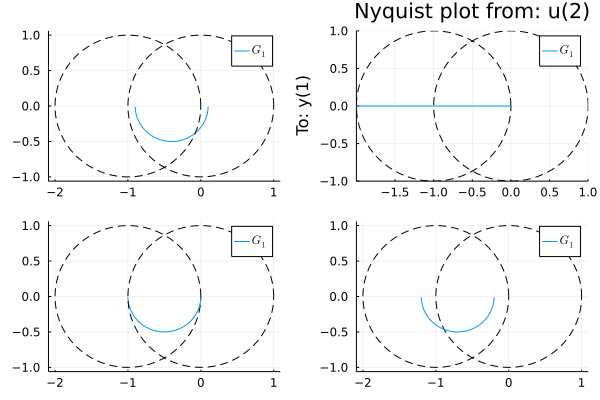
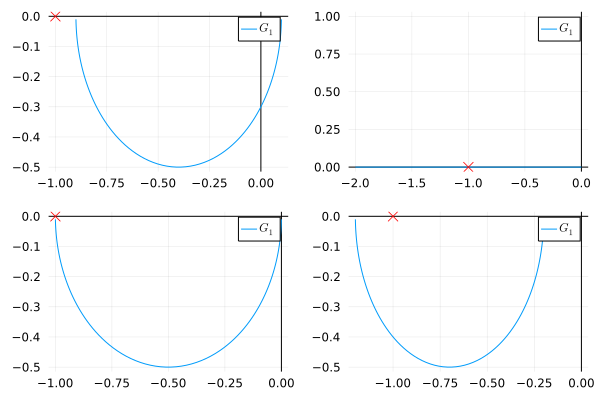
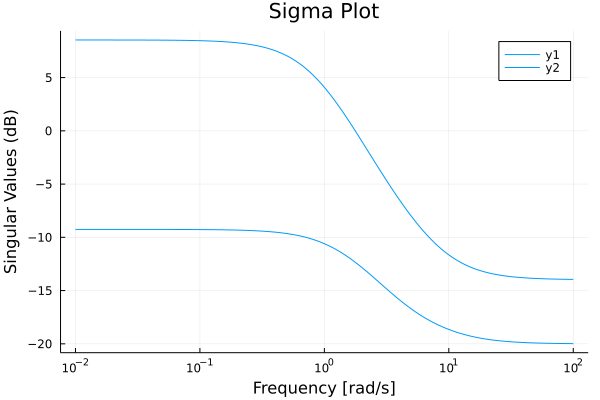
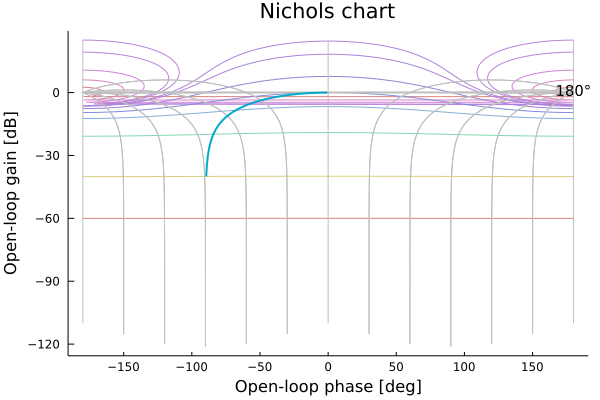
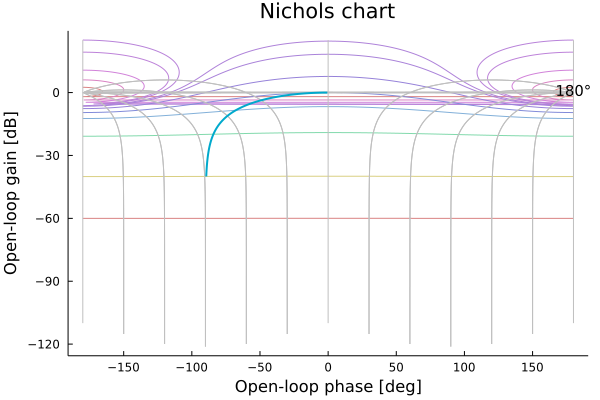
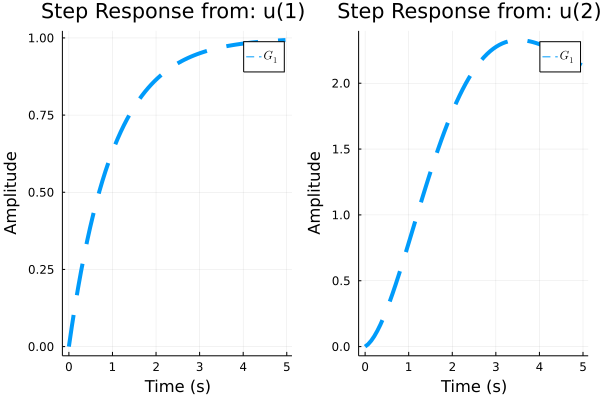
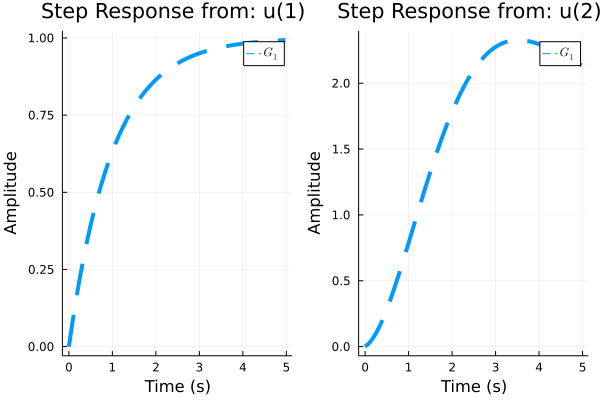
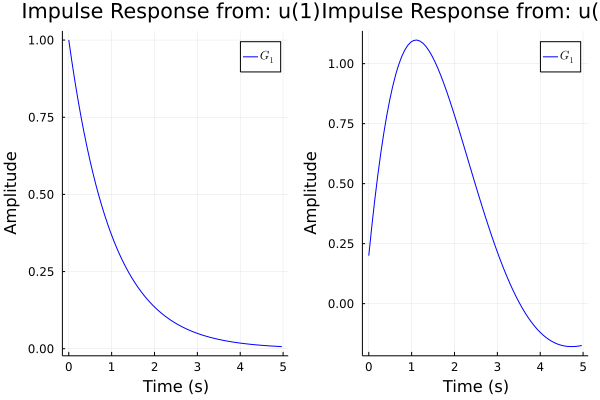
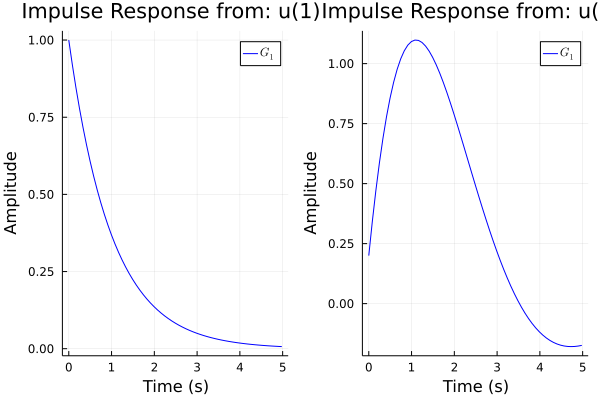
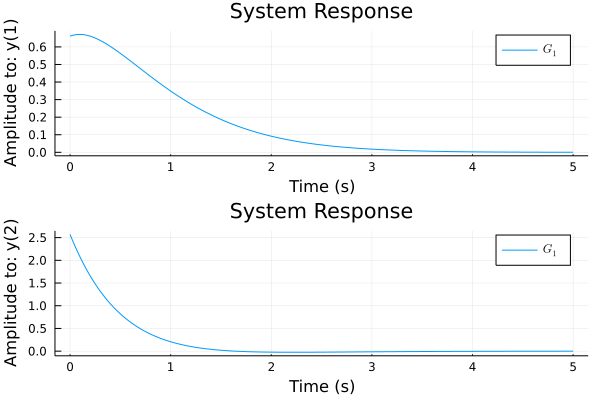
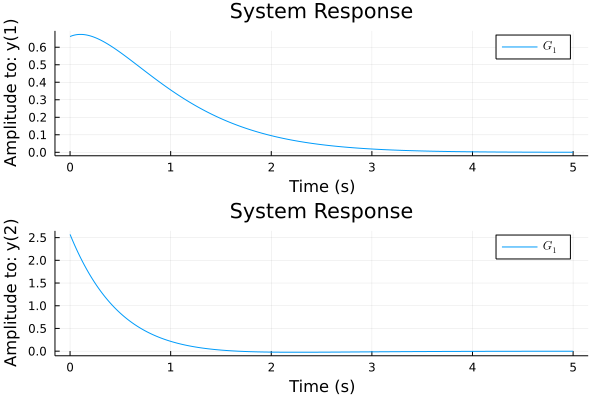
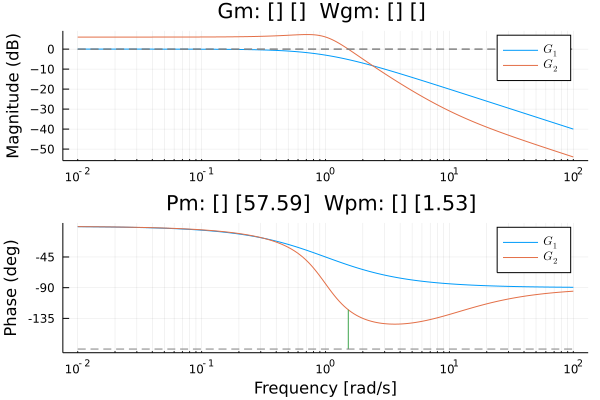
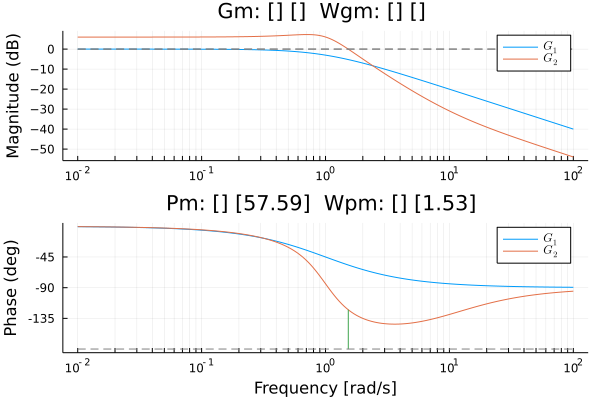
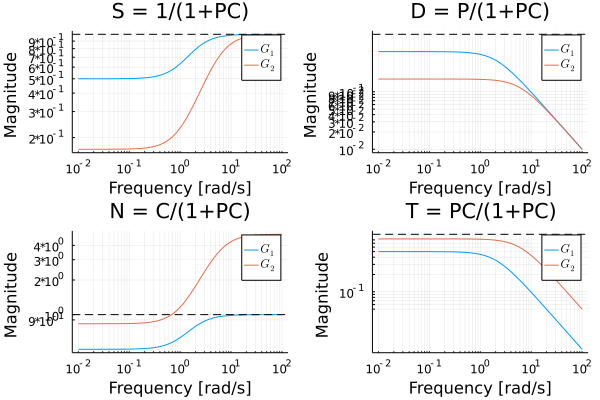
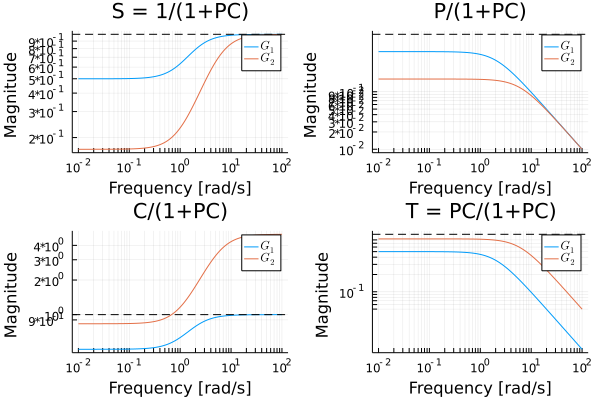
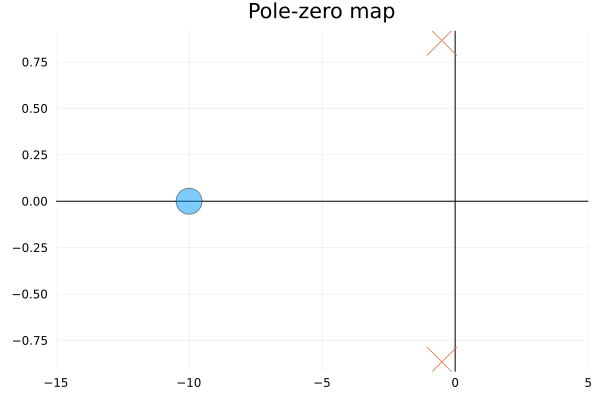
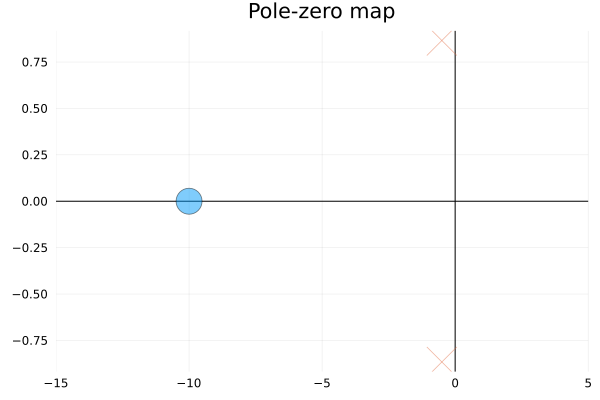
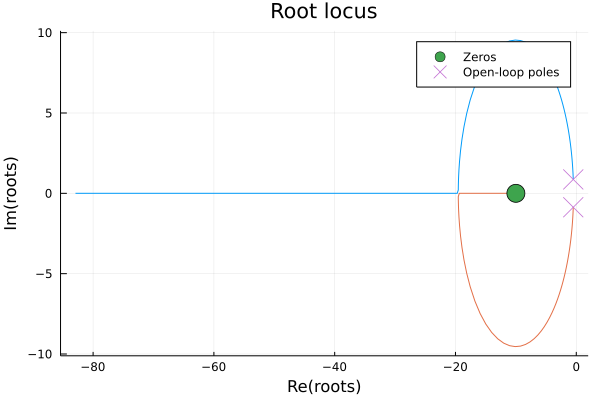
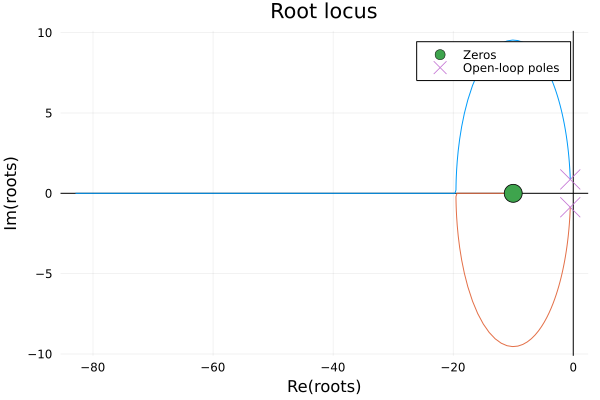
Plots were compared to references. 11/11 images have changed, see differences below.
After pulling this PR, please update the reference images by creating a PR to ControlExamplePlots.jl here.
Changing dlqr to lqrd will really mess people up who are coming from Matlab. Those two functions in Matlab are very different - dlqr designs the gain assuming a discrete-time system and a discrete-time cost function whereas lqrd designs the gain assuming a continuos-time system and continuous-time cost function (just with both discretized internally, so the discrete-time controller has a cost equivalent to the continuous-time cost). The current implementation matches Matlab's dlqr function, not its lqrd function.
I'm not really a fan of the other changes either, I kind of liked the prefix for differentiating between the continuous and discrete-time versions.
Add this suggestion to a batch that can be applied as a single commit.This suggestion is invalid because no changes were made to the code.Suggestions cannot be applied while the pull request is closed.Suggestions cannot be applied while viewing a subset of changes.Only one suggestion per line can be applied in a batch.Add this suggestion to a batch that can be applied as a single commit.Applying suggestions on deleted lines is not supported.You must change the existing code in this line in order to create a valid suggestion.Outdated suggestions cannot be applied.This suggestion has been applied or marked resolved.Suggestions cannot be applied from pending reviews.Suggestions cannot be applied on multi-line comments.Suggestions cannot be applied while the pull request is queued to merge.Suggestion cannot be applied right now. Please check back later.


The function
lqrstill exists for systems as inputs, where it's clear from the system type which version to call. For matrix inputs, we now require an explicitc/d.The
c/dhas been put at the end of the function name instead of in the beginning to be consistent withMatrixEquationsand to aid discovery.lyapstill exists without acin the end since the function belongs toLinearAlgebra.