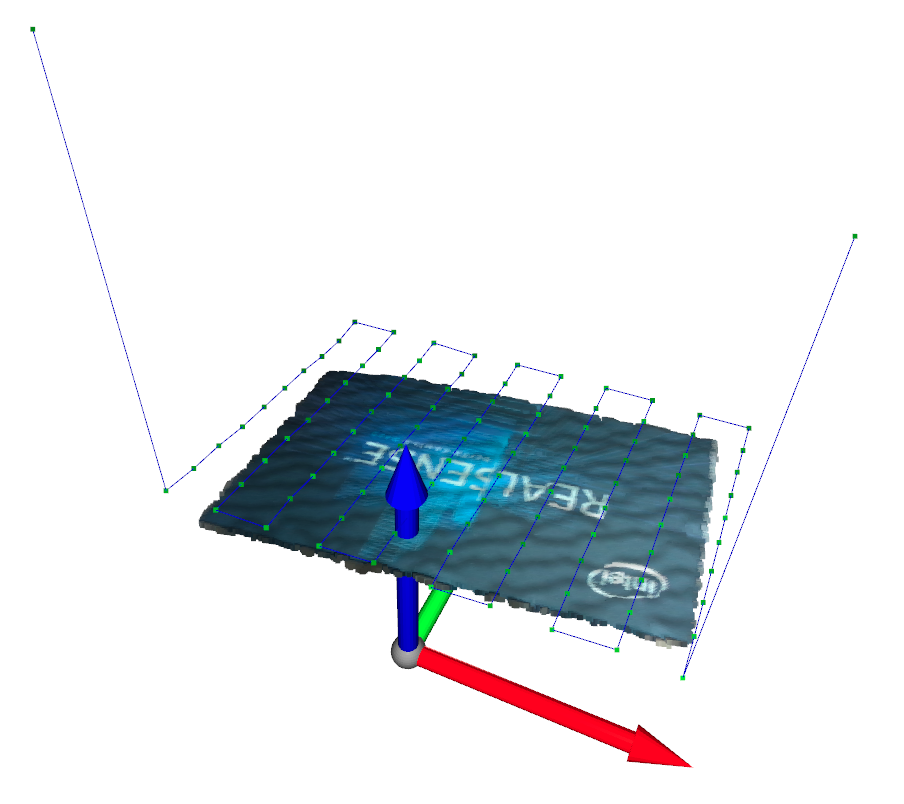
- Executes a scan path with a depth camera
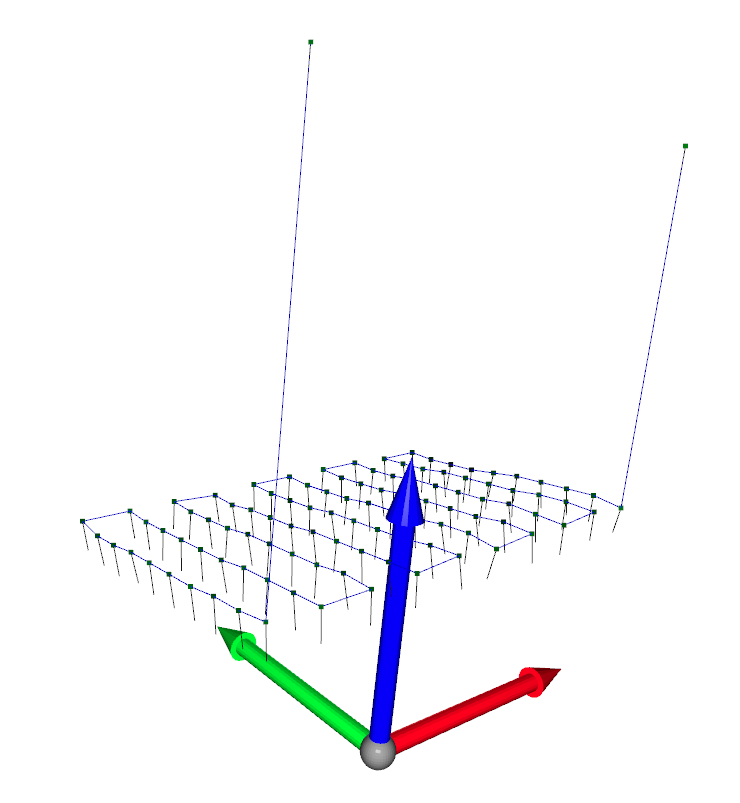
- Reconstructs the surface of the objects observed by the camera
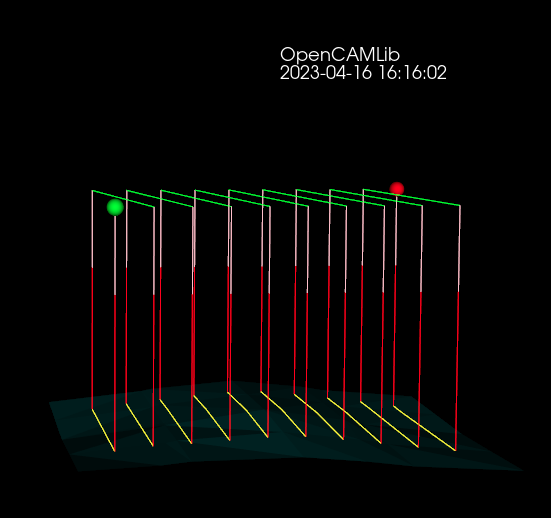
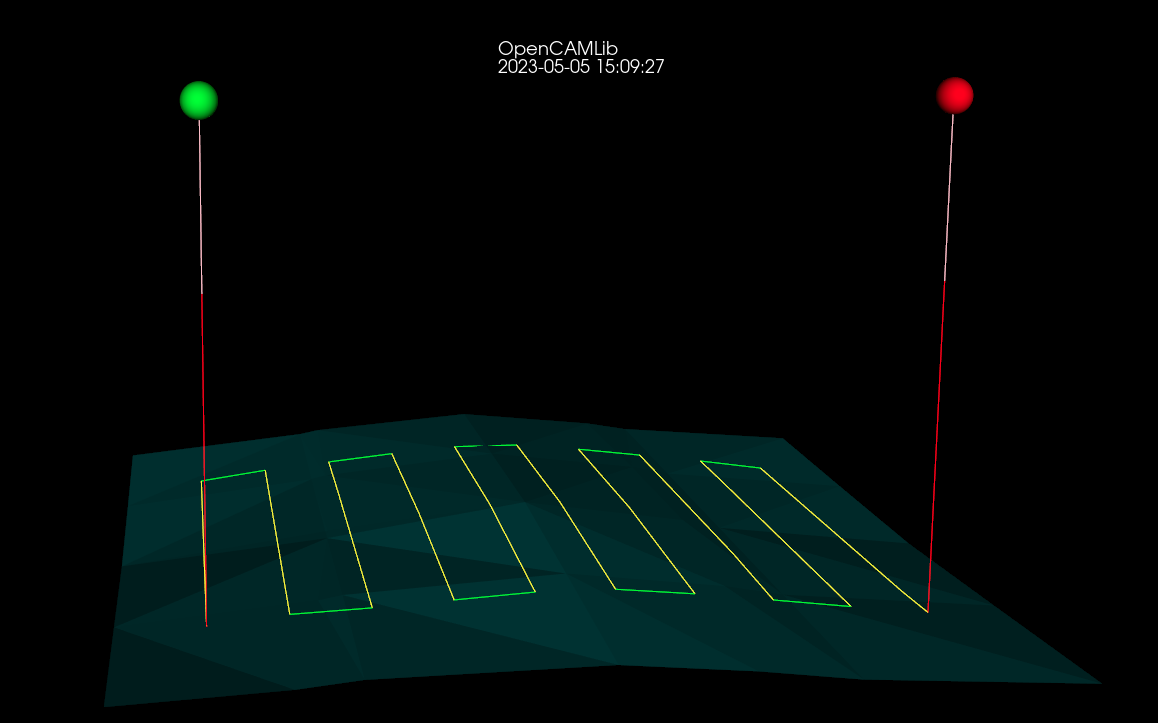
- Plan tool path on the reconstructed surface
- Plans robot motions the tool path
- Executes the process path
roscore
rosrun pathplan parallel_finish_zig.py
rostopic echo /chatter
rosrun pathplan pathplanning.py
roscore
rosrun pathplan pathplan.py
rostopic echo /pathplanning