Here is a set of repositories, containing 3 kinds of contents,
-
Documents:
Step-by-step guidances to clone housework robots including Stanford mobile aloha and others.
The documents are organized into seasons, and each season consists of multiple episodes.
-
Source codes:
Every season has a source code repository.
Aligned with the guidances, the repositories contain the related source codes.
Some source codes are modified based on the original source codes like Stanford mobile aloha open source.
Other source codes are created by our team, usually aimed to improve the performance of the robot.
-
Videos:
The content of the videos are video records of the robot movement, controlled by the source codes in the repositories.
Usually every season's every episode has one video with 2 versions. The English version is hosted in Youtube.com, and the Chinese version is hosted in Bilibili.com
-
S01E01. Migrate Stanford aloha from ROS1 to ROS2
Click the preview image to see the video on youtube, the content is our objective and project progress.
-
S01E02. Manipulate interbotix robotic arm with rviz2
-
S01E03. Manipulate the physical interbotix robotic arm
-
S01E04. Clone Stanford aloha robotic arms hardware architecture
-
S01E05. Interbotix bug fixing


-
S02E01. Why to learn LeRobot?
-
S02E02. The data format of LeRobot brain

-
S02E03. A case study, the data format of the native Stanford aloha robot body
-
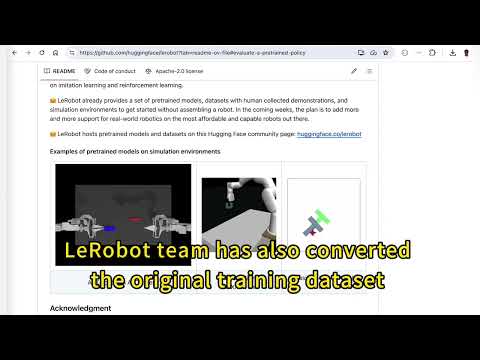
S02E04. Train leRobot brain
-
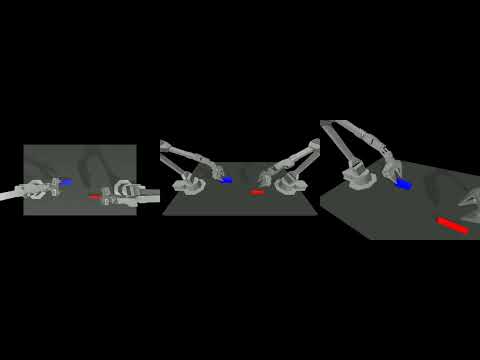
S02E05. Transplant leRobot brain to Aloha body



-
S03E01. Programming unitree-go2 robodog with python
-
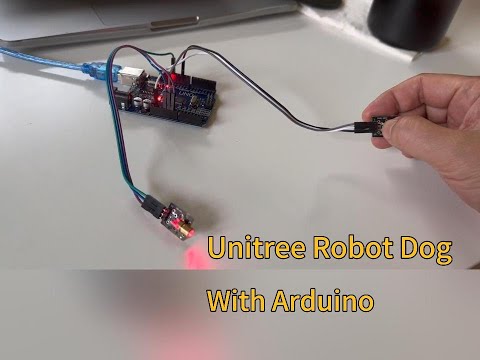
S03E02. Integrate Arduino into Unitree Go2 Robot Dog
-
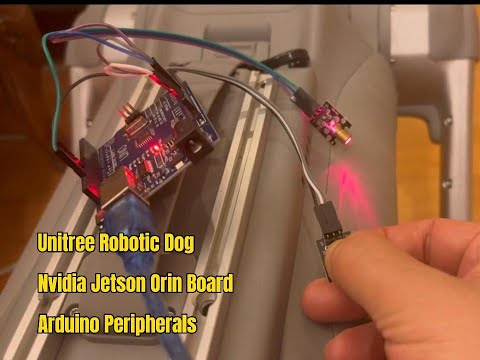
S03E03. Nvidia Orin board of Unitree Go2 Robot Dog
-
S03E04. See the world through Unitree robotic dog's eyes


-
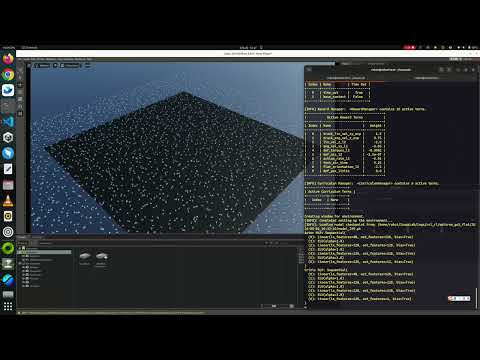
S04E01. Trouble shooting for the installation of Isaac Sim and Lab
-
S04E02. Train Unitree Go2 Robot Dog with Isaac Sim/Lab
-
S04E03. Anatomy of Isaac Lab