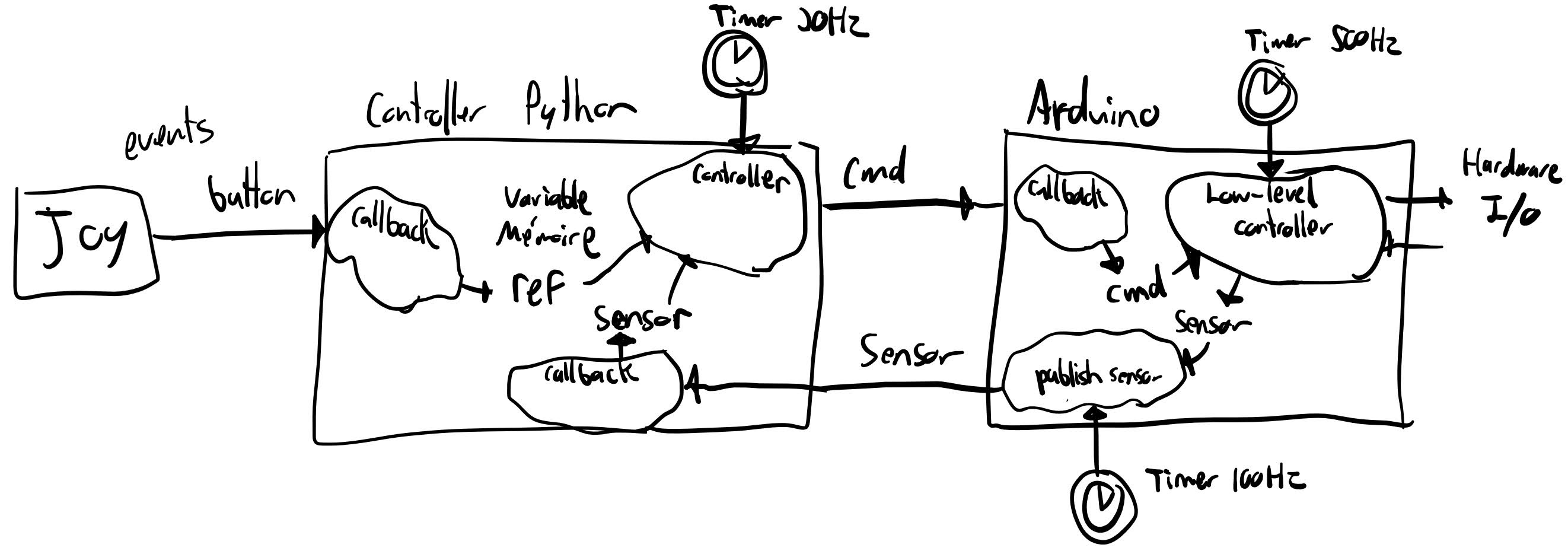
- read joystick buttons to use as a set-point
- compute command in a python controller script
- command is send to an arduino using rosserial
- low-level task executed on the arduino
- sensor data from the arduino is sent back to the python controller using rosserial