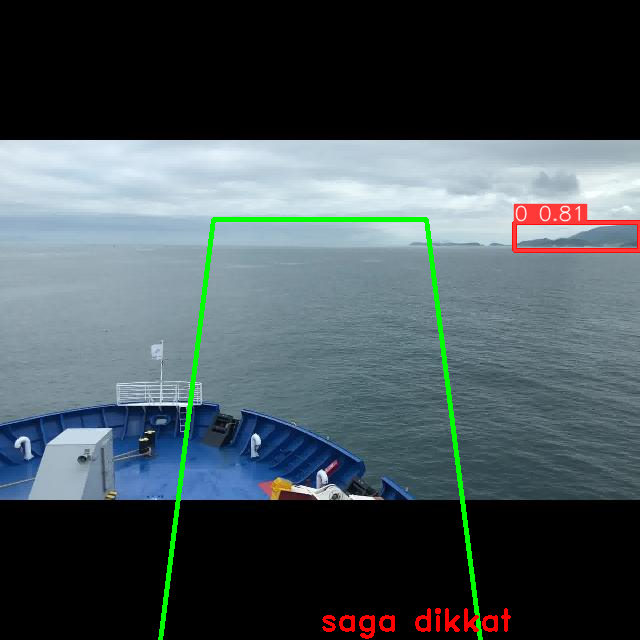
This algorithm is an algorithm that detects obstacles via yolov5 in line with the barbaros usv system autonomous obstacle avoidance algorithm. It gives the following outputs according to the position of the obstacle over the safe zone it has drawn.
download the project
https://github.com/Whitte10/BarbarosAIsystemgo to project path
cd my-projectinstall required packages
pip install /r requirements.txtrun the code
python3 detect.py Note:if you are in ubuntu specify main folder location on line 8
- Ubuntu support (change on line 8 required)
- Windows support
- Compatibility with different inputs (by inserting images into testimages)
- Compatibility with different resolutions
Here are some related projects
İslemci: Intel(R) Core(TM) i7-10750H CPU @ 2.60GHz 2.59 GHz
GPU: Nvidia RTX2060
In the test images, the horizon line and the ship lines are sometimes confused because the POV images also include parts of the ship where the camera is mounted. In order to solve this error, the edges detected at the bottom of the picture were not included in the calculation and the horizon line was tried to be calculated in this way. And our model need more training because sometimes it can not detect obstacles accordingly
Ros detection

Real World Dtection
- @Whitte10 for design and development.
- @scbektas for design and testing.
- @berkanyasar for testing.
If you have any feedback, please contact us at barbarosida53@gmail.com.
Email barbarosida53@gmail.com for support.