
Complexity of an algorithm measures time and memory. How long does one algorithm takes to finish? How much memory does it use?
We measure these values in terms of the input size (Usually for the input size we use the letter
We can analyze algorithms in the Best case, Average case and Worst case.
Best case measures the quickest way for an algorithm to finish.
Average case measures what time does the algorithm need to finish on average.
Worst case measures the slowest time for an algorithm to finish.
- Big O:
- the algorithm takes at most
steps to finish in the WORST CASE.
- Little o:
- the algorithm takes less than
- Big Omega:
- the algorithm takes at least
- Little Omega:
- the algorithm takes more than
- Big Theta:
- the combination of
https://www.bigocheatsheet.com/
means that if our algorithm takes input of 10 elements it will need 100 steps to finish in the worst case. If the input is of 100 elements it will need 10000 steps to finish in the worst case.
Usually we discard constants when using Big O, but in some cases the constant can be meaningful for small input sizes. In the following example is faster than
because our complexities are
and
so for
the
algorithm is faster than the
one.

Sorting means ordering a set of elements in a sequence.
We can sort a set of elements whose elements are in partial order. Partial order is a relation with the following properties:
- Antisymmetry - For every 2 elements in the set (A, B), if
and
then
.
- Transitivity - For every 3 elements in the set (A, B, C), if
then
.
- Reflexivity - For every element in the set A,
.
A sorting algorithm is stable if two equal objects appear in the same order in the ordered output as they appeared in the unsorted input.
Example input:
. Here
and
are simply a 3 but we have marked them to follow what happens with them after the sorting.
Example output:
Unstable sort output:
Uses only a small constant amount of extra memory. In place sort means the elements are swapped around. Out of place means we use another extra array to swap items around.
How many times do we need to compare 2 elements. For most sorts this represents the time complexity.
Determines whether the sorting algorithm runs faster for inputs that are partially or fully sorted. If an algorithm is unadaptive it runs for the same time on sorted and unsorted input. If an algorithm is adaptive it runs faster on sorted input than on unsorted input.
Determines if an algorithm needs all the items from the input to start sorting. If an algorithm is online it can start sorting input that is given in parts. If an algorithm is offline it can start sorting only after it has the whole input.
Allows sorting data which cannot fit into memory. Such algorithms are designed to sort massive amounts of data (Gigabytes, Terabytes, etc.)
An algorithm which can be ran on multiple threads at the same time, speeding the running time.
An algorithm which heavily uses the processor cache to speed up its execution. The data processed needs to be sequentially located.
// swap the values of two variables
void swap(int & a, int & b) {
int tmp = a;
a = b;
b = tmp;
}| Bubble sort | n = input size |
|---|---|
| Time complexity | |
| Space complexity | |
| Adaptive | Yes |
| Stable | Yes |
| Number of comparisons | |
| Number of swaps | |
| Online | No |
| In place | Yes |
Honorable mention - Cocktail shaker sort, similar to bubble and selection sort. It’s like the Online version of bubble sort.
void bubbleSort(int * array, int length) {
for (int bubbleStartIndex = 0; bubbleStartIndex < length; bubbleStartIndex++) {
for (int bubbleMovedIndex = 0; bubbleMovedIndex < length - 1; bubbleMovedIndex++) {
if (array[bubbleMovedIndex] > array[bubbleMovedIndex+1]) {
swap(array[bubbleMovedIndex], array[bubbleMovedIndex+1]);
}
}
}
}void bubbleSort(int * array, int length) {
for (int i = 0; i < length; i++) {
for (int k = 0; k < length - 1; k++) {
if (array[k] > array[k+1]) {
swap(array[k], array[k+1]);
}
}
}
}void bubbleSort(int * array, int length) {
for (int i = 0; i < length; i++) {
for (int k = 0; k < length - 1 - i; k++) { // length - 1 - i = 2x less iterations
if (array[k] > array[k+1]) {
swap(array[k], array[k+1]);
}
}
}
}void bubbleSort(int * array, int length) {
for (int i = 0; i < length; i++) {
bool swappedAtLeastOnce = false; // add a flag to check if a swap has occurred
for (int k = 0; k < length - 1 - i; k++) {
if (array[k] > array[k+1]) {
swap(array[k], array[k+1]);
swappedAtLeastOnce = true;
}
}
if (!swappedAtLeastOnce) { // if there were no swaps, it's ordered
break;
}
}
}| Selection sort | n = input size |
|---|---|
| Time complexity | |
| Space complexity | |
| Adaptive | No |
| Stable | No |
| Number of comparisons | |
| Number of swaps | |
| Online | No |
| In place | Yes |
- It’s better than bubble sort in cases we need to sort items which are very large in size because it has
$\mathcal{O}(n)$ swaps.
void selectionSort(int * array, int length) {
for (int currentIndex = 0; currentIndex < length; currentIndex++) {
int smallestNumberIndex = currentIndex;
for (int potentialSmallerNumberIndex = currentIndex + 1;
potentialSmallerNumberIndex < length;
potentialSmallerNumberIndex++) {
if (array[potentialSmallerNumberIndex] < array[smallestNumberIndex]) {
smallestNumberIndex = potentialSmallerNumberIndex;
}
}
swap(array[currentIndex], array[smallestNumberIndex]);
}
}void selectionSort(int * array, int length) {
for (int i = 0; i < length; i++) {
int index = i;
for (int k = i + 1; k < length; k++) {
if (array[k] < array[index]) {
index = k;
}
}
swap(array[i], array[index]);
}
}| Insertion sort | n = input size |
|---|---|
| Time complexity | |
| Space complexity | |
| Adaptive | Yes |
| Stable | Yes |
| Number of comparisons | |
| Number of swaps | |
| Online | Yes |
| In place | Yes |
- The best algorithm for sorting small arrays.
- Often combined with other algorithms for optimal runtime.
void insertionSort(int * array, int length) {
for (int nextItemToSortIndex = 1; nextItemToSortIndex < length; nextItemToSortIndex++) {
for (int potentiallyBiggerItemIndex = nextItemToSortIndex;
potentiallyBiggerItemIndex > 0 &&
array[potentiallyBiggerItemIndex] < array[potentiallyBiggerItemIndex - 1];
potentiallyBiggerItemIndex--) {
swap(array[potentiallyBiggerItemIndex], array[potentiallyBiggerItemIndex-1]);
}
}
}void insertionSort(int * array, int length) {
for (int i = 1; i < length; i++) {
for (int k = i; k > 0 && array[k] < array[k - 1]; k--) {
swap(array[k], array[k-1]);
}
}
}| Merge sort | n = input size |
|---|---|
| Time complexity | |
| Space complexity | |
| Adaptive | No |
| Stable | Yes |
| Number of comparisons | |
| External | Yes |
| Parallel | Yes |
| Online | No |
| In place | No |
- Every array of 0 or 1 elements is sorted.
- Merging requires additional memory.
- Splitting the array in 2 every time gives us
$log(n)$ levels. - On each level we have
$\mathcal{O}(n)$ for the merging operation.
Honorable mention - Ford–Johnson aka. Merge-insertion sort. Cool idea, but not practical enough.
Important algorithm: Timsort - Absolute beast with worst case and
best case. Implementation can be found here: https://github.com/tvanslyke/timsort-cpp

void merge(int * originalArray, int * mergeArray, int start, int mid, int end) {
int leftIndex = start;
int rightIndex = mid + 1;
int sortedIndex = start;
while (leftIndex <= mid && rightIndex <= end) {
if (originalArray[leftIndex] <= originalArray[rightIndex]) {
mergeArray[sortedIndex] = originalArray[leftIndex];
leftIndex++;
} else {
mergeArray[sortedIndex] = originalArray[rightIndex];
rightIndex++;
}
sortedIndex++;
}
while (leftIndex <= mid) {
mergeArray[sortedIndex] = originalArray[leftIndex];
leftIndex++;
sortedIndex++;
}
while (rightIndex <= end) {
mergeArray[sortedIndex] = originalArray[rightIndex];
rightIndex++;
sortedIndex++;
}
for (int i = start; i <= end; i++) {
originalArray[i] = mergeArray[i];
}
}
void mergeSortRecursive(int * original, int * mergeArray, int start, int end) {
if (start < end) {
int mid = (start + end) / 2;
mergeSortRecursive(original, mergeArray, start, mid);
mergeSortRecursive(original, mergeArray, mid + 1, end);
merge(original, mergeArray, start, mid, end);
}
}
void mergeSort(int * array, int length) {
int * mergeArray = new int[length];
mergeSortRecursive(array, mergeArray, 0, length - 1);
delete[] mergeArray;
}void merge(int * originalArray, int * mergeArray, int start, int mid, int end) {
int left = start;
int right = mid + 1;
for (int i = start; i <= end; i++) {
if (left <= mid && (right > end || originalArray[left] <= originalArray[right])) {
mergeArray[i] = originalArray[left];
left++;
} else {
mergeArray[i] = originalArray[right];
right++;
}
}
for (int i = start; i <= end; i++) {
originalArray[i] = mergeArray[i];
}
}
void mergeSortRecursive(int * originalArray, int * mergeArray, int start, int end) {
if (start < end) {
int mid = (start + end) / 2;
mergeSortRecursive(originalArray, mergeArray, start, mid);
mergeSortRecursive(originalArray, mergeArray, mid + 1, end);
merge(originalArray, mergeArray, start, mid, end);
}
}
void mergeSort(int * array, int length) {
int * mergeArray = new int[length];
mergeSortRecursive(array, mergeArray, 0, length - 1);
delete[] mergeArray;
}| Quick sort | n = input size |
|---|---|
| Time complexity (Worst case) | |
| Time complexity (Average case) | |
| Space complexity | |
| Adaptive | No |
| Anti-Adaptive | Yes (the more randomness, the better) |
| Stable | No |
| Number of comparisons | |
| Parallel | Yes |
| Online | No |
| In place | Yes |
| Locality | Yes |
- Quick sort adores chaos. That’s why a common strategy is to shuffle the array before sorting it.
C++ STL sorting algorithm is Introsort, which is a hybrid between quicksort and heapsort.
Quick sort optimization for arrays with many equal numbers - three-way partitioning, aka Dutch national flag.
Quick sort can also be optimized with picking 2 pivots instead of 1 - multi-pivot quicksort.
The table bellow is an approximation of the time required to access data from the disk/ram/CPU cache. It gives us an idea why quick sort is indeed quick. Quick sort being in-place gets reduced to problems in the CPU cache very fast. Merge sort on the other hand uses additional memory, so it has 2 arrays it works with essentially. Often these 2 arrays cannot simultaneously enter the cache so they have to be read from RAM, which is very slow. Quick sort, however, uses only one array which gets pulled into the CPU cache and operations on it are very fast.
| Memory hierarchy | CPU cycles | size |
|---|---|---|
| HDD | 500, 000 | 1 TB |
| RAM | 100 | 4 GB |
| L2 cache | 10 | 512 kb |
| L1 cache | 1 | 32 kb |
- Find k-th biggest/smallest element
int partition(int * array, int startIndex, int endIndex) {
int pivot = array[endIndex];
int pivotIndex = startIndex;
for (int i = startIndex; i <= endIndex; i++) {
if (array[i] < pivot) {
swap(array[i], array[pivotIndex]);
pivotIndex++;
}
}
swap(array[endIndex], array[pivotIndex]);
return pivotIndex;
}
void _quickSort(int * array, int startIndex, int endIndex) {
if (startIndex < endIndex) {
int pivot = partition(array, startIndex, endIndex);
_quickSort(array, startIndex, pivot - 1);
_quickSort(array, pivot + 1, endIndex);
}
}
void quickSort(int * array, int length) {
_quickSort(array, 0, length - 1);
}int partition(int * array, int start, int end) {
int pivot = array[end];
int pivotIndex = start;
for (int i = start; i <= end; i++) {
if (array[i] < pivot) {
swap(array[i], array[pivotIndex]);
pivotIndex++;
}
}
swap(array[end], array[pivotIndex]);
return pivotIndex;
}
void _quickSort(int * array, int start, int end) {
if (start < end) {
int pivot = partition(array, start, end);
_quickSort(array, start, pivot - 1);
_quickSort(array, pivot + 1, end);
}
}
void quickSort(int * array, int length) {
_quickSort(array, 0, length - 1);
}#include <random>
int generateRandomNumber(int from, int to) {
std::random_device dev;
std::mt19937 rng(dev());
std::uniform_int_distribution<std::mt19937::result_type> dist6(from,to);
return dist6(rng);
}
int partition(int * array, int start, int end) {
int randomIndex = generateRandomNumber(start, end);
swap(array[end], array[randomIndex]);
int pivot = array[end];
int pivotIndex = start;
for (int i = start; i <= end; i++) {
if (array[i] < pivot) {
swap(array[i], array[pivotIndex]);
pivotIndex++;
}
}
swap(array[end], array[pivotIndex]);
return pivotIndex;
}
void _quickSort(int * array, int start, int end) {
if (start < end) {
int pivot = partition(array, start, end);
_quickSort(array, start, pivot - 1);
_quickSort(array, pivot + 1, end);
}
}
void quickSort(int * array, int length) {
_quickSort(array, 0, length - 1);
}#include <random>
int generateRandomNumber(int from, int to) {
std::random_device dev;
std::mt19937 rng(dev());
std::uniform_int_distribution<std::mt19937::result_type> dist6(from,to);
return dist6(rng);
}
void shuffle(int * arr, int length) {
for (int i = 0; i < length - 1; i++) {
int swapCurrentWith = generateRandomNumber(i, length - 1);
swap(arr[i], arr[swapCurrentWith]);
}
}
int partition(int * array, int start, int end) {
shuffle(array + start, end - start);
int pivot = array[end];
int pivotIndex = start;
for (int i = start; i <= end; i++) {
if (array[i] < pivot) {
swap(array[i], array[pivotIndex]);
pivotIndex++;
}
}
swap(array[end], array[pivotIndex]);
return pivotIndex;
}
void _quickSort(int * array, int start, int end) {
if (start < end) {
int pivot = partition(array, start, end);
_quickSort(array, start, pivot - 1);
_quickSort(array, pivot + 1, end);
}
}
void quickSort(int * array, int length) {
_quickSort(array, 0, length - 1);
}int partition(int * array, int start, int end) {
int pivot = array[(start + end) / 2];
int left = start - 1;
int right = end + 1;
while (true) {
do {
left++;
} while (array[left] < pivot);
do {
right--;
} while (array[right] > pivot);
if (left >= right) {
return right;
}
swap(array[left], array[right]);
}
}
void _quickSort(int * array, int start, int end) {
if (start < end) {
int pivot = partition(array, start, end);
_quickSort(array, start, pivot - 1);
_quickSort(array, pivot + 1, end);
}
}
void quickSort(int * array, int length) {
_quickSort(array, 0, length - 1);
}| Counting sort | n = input size, k = max number |
|---|---|
| Time complexity (Worst case) | |
| Time complexity (Best case) | |
| Space complexity |
- Not a comparison sort.
- Very efficient for an array of integers with many repeating integers with small difference between the biggest and smallest integer.
- Counting inversions
void countingSort(int * array, int length) {
int maxNumber = 0;
for (int i = 0; i < length; i++) {
if (array[i] > maxNumber) {
maxNumber = array[i];
}
}
int * countingArray = new int[maxNumber + 1];
for (int i = 0; i < maxNumber + 1; i++) {
countingArray[i] = 0;
}
for (int i = 0; i < length; i++) {
countingArray[array[i]]++;
}
int sortedIndex = 0;
for (int i = 0; i < length; i++) {
while (countingArray[sortedIndex] == 0) {
sortedIndex++;
}
array[i] = sortedIndex;
countingArray[sortedIndex]--;
}
delete[] countingArray;
}| Bucket sort | n = input size, k = number of buckets |
|---|---|
| Time complexity (Worst case) | |
| Time complexity (Average case) | |
| Space complexity |
- It’s a distribution sort, not a comparison sort.
- Very situational sort.
- The bellow code is a sample implementation for floats between 0 and 1.
#include <iostream>
#include <vector>
#include <algorithm>
void bucketSort(double *array, int length) {
std::vector<double> buckets[length];
for(int i = 0; i < length; i++) {
buckets[int(length * array[i])].push_back(array[i]);
}
for(int i = 0; i < length; i++) {
sort(buckets[i].begin(), buckets[i].end());
}
int index = 0;
for(int i = 0; i < length; i++) {
while(!buckets[i].empty()) {
array[index] = buckets[i][0];
index++;
buckets[i].erase(buckets[i].begin());
}
}
}| Radix sort | n = input size |
|---|---|
| Time complexity (Worst case) | |
| Time complexity (Average case) | |
| Space complexity |
- Good on multi-threaded machines.
#include <iostream>
#include <cmath>
#include <list>
int abs(int a) {
return a >= 0 ? a : -a;
}
void radixSort(int * array, int length) {
int maxNumber = 0;
for (int i = 0; i < length; i++) {
if (abs(array[i]) > maxNumber) {
maxNumber = abs(array[i]);
}
}
int maxDigits = log10(maxNumber) + 1;
std::list<int> pocket[10];
for(int i = 0; i < maxDigits; i++) {
int m = pow(10, i + 1);
int p = pow(10, i);
for(int j = 0; j < length; j++) {
int temp = array[j] % m;
int index = temp / p;
pocket[index].push_back(array[j]);
}
int count = 0;
for(int j = 0; j<10; j++) {
while(!pocket[j].empty()) {
array[count] = *(pocket[j].begin());
pocket[j].erase(pocket[j].begin());
count++;
}
}
}
}| Linear search | n = input size |
|---|---|
| Time complexity | |
| Space complexity |
Iterate every element in order and check if it is the element we are looking for.
int linearSearch(int *array, int length, int target) {
for (int i = 0; i < length; i++) {
if (array[i] == target) {
return i;
}
}
return -1;
}Searching in unordered data, when we have very few queries. If we have many queries it’s better to sort the array and use faster searching for the queries.
| Binary search | n = input size |
|---|---|
| Time complexity | |
| Space complexity |
Works only on sorted array-like structures, which support
The algorithm uses
- Check the middle element, if it’s the element we are looking for - we are done
- If the element is bigger than the one we are looking for - recurse into the left sub-array (the sub-array with smaller elements).
- If the element is smaller than the one we are looking for - recurse into the right sub-array (the sub-array with bigger elements).
int binarySearch(int *array, int length, int target) {
int left = 0;
int right = length - 1;
while(left <= right) {
int mid = (left + right) / 2;
if (array[mid] == target) {
return mid;
}
if (array[mid] > target) {
right = mid - 1;
}
if (array[mid] < target) {
left = mid + 1;
}
}
return -1;
}Fast searching in ordered data.
Guess and check algorithms.
| Ternary search | n = input size |
|---|---|
| Time complexity | |
| Space complexity |
The same idea as binary search but we split the array in 3 parts. On each step we decide which one part to discard and recurse into the other 2.
int ternarySearch(int *array, int length, int target) {
int left = 0;
int right = length - 1;
while (left <= right) {
int leftThird = left + (right - left) / 3;
int rightThird = right - (right - left) / 3;
if (array[leftThird] == target) {
return leftThird;
}
if (array[rightThird] == target) {
return rightThird;
}
if (target < array[leftThird]) {
right = leftThird - 1;
} else if (target > array[rightThird]) {
left = rightThird + 1;
} else {
left = leftThird + 1;
right = rightThird - 1;
}
}
return -1;
}Finding min/max in a sorted array.
| Exponential search | n = input size |
|---|---|
| Time complexity | |
| Space complexity |
This is the binary search algorithm applied for ordered data of unknown size. We don’t have a mid point so we start from the beginning and double our guessed index each time. e.g for guessed index: 1, 2, 4, 8, 16, 32... If we overshoot the end of the data we go back using binary search because we now have an end index. e.g for array with 27 elements we do a jump to element 32 which doesn’t exist and then use binary search on elements 16 - 32.
int exponentialSearch(int *array, int length, int target) {
if (length == 0) {
return false;
}
int right = 1;
while (right < length && array[right] < target) {
right *= 2;
}
int binaryIndex = binarySearch(array + right/2, min(right + 1, length) - right/2, target);
if (binaryIndex != -1) {
return binaryIndex + right/2;
} else {
return -1;
}
}Binary search on streams, which are ordered and other ordered data of unknown size.
| Jump search | n = input size |
|---|---|
| Time complexity | |
| Space complexity |
We decide on a jump step and check elements on each step. e.g for step 32 we will check elements 0, 32, 64, etc.
Optimal jump step is
int jumpSearch(int *array, int length, int target) {
int left = 0;
int step = sqrt(length);
int right = step;
while(right < length && array[right] <= target) {
left += step;
right += step;
if(right > length - 1)
right = length;
}
for(int i = left; i < right; i++) {
if(array[i] == target)
return i;
}
return -1;
}Because it’s worse than Binary search, it’s useful when the data structure we are searching in has very slow jump back, aka it’s slow to go back to index
| Interpolation search | n = input size |
|---|---|
| Time complexity for evenly distributed data | |
| Time complexity for badly distributed data | |
| Space complexity |
If we have well distributed data we can approximate where we will find the element with the following formula
Example for well distributed data: 1, 2, 3, 4, 5, 6 .... 99, 100
Example for badly distributed data: 1, 1, 1, 1.... 1, 1, 100
int interpolationSearch(int *array, int length, int target) {
int left = 0;
int right = length - 1;
while (array[right] != array[left] && target >= array[left] && target <= array[right]) {
int mid = left + ((target - array[left]) * (right - left) / (array[right] - array[left]));
if (array[mid] < target)
left = mid + 1;
else if (target < array[mid])
right = mid - 1;
else
return mid;
}
if (target == array[left])
return left;
else
return -1;
}Very situational, when we have data which is evenly distributed.

Linked list stores its data in separate Nodes. Each node points the next node in the list. The last node points NULL.
The most primitive linked list’s node contains 2 fields - Data and Next pointer
struct Node {
int data;
Node* next;
};| Operation / Data structure | Array | Singly linked list without tail | Singly linked list with tail | Doubly linked list without tail | Doubly linked list with tail |
|---|---|---|---|---|---|
| push_front | |||||
| pop_front | |||||
| get_front | |||||
| push_back | |||||
| pop_back | |||||
| get_back | |||||
| get_at | |||||
| find_key | |||||
| erase_key | |||||
| is_empty | |||||
| add_before | |||||
| add_after |


Linked lists are useful if we don’t know the input size (when getting data from streams).
Also if we want constant time for adding/removing element from the front/back and not amortized constant.


Singly linked lists have only one pointer to the next Node.
struct Node {
int data;
Node* next;
};Doubly linked lists have two pointers, one to the previous item, one to the next.
struct Node {
int data;
Node* previous;
Node* next;
};Circular linked lists can be implemented as singly or doubly linked list but the start and end nodes are connected. i.e the end node’s next pointer is not NULL but points the first node instead.
Doubly linked list using memory for singly linked list. The idea is to XOR the address of the previous element and the next element and save that XOR value in one pointer. When we need to access the next element, we XOR the pointer we have saved with the address of the previous element and the result will be the pointer to the next element.
Linked list of arrays. Usually the size of the array is the size of the CPU cache. This way we can quickly iterate through the arrays in the cache and we also have the benefits of a linked list.
A skip list is a linked list-like data structure which allows search and
insertion in an ordered sequence of elements. It builds
lanes up with links more and more sparse. The chance to build the next lane of links up is 1/2. The higher lanes are “express lanes” for the lanes bellow. The idea is to quickly get to the approximate location we need to get to on the higher lanes and then go down on the lower lanes to the exact location we need.

A dynamic array is an array which grows in size when it’s full. Each time it increases its size 2 times. e.g the size at the start is 1, then 2, 4, 8, 16....
The good points are we have amortized Add and
access like in regular arrays.
The downsides are If we have added 32 items and have reserverd 64 items, but don’t add any more items we are wasting memory needlessly. Also, when adding, if the array is full we will need to resize so occasionally our Add will be with complexity.
Amortized complexity is the total expense per operation, evaluated over a sequence of operations.
In other words if we add 1 item it could be very expensive but if we add
n items it is going be to add all n-items.
Explained with example:
Let’s take a dynamic array (in C++ that would be std::vector).
At the start we have 1 empty slot. In constant time we add 1 item at the end.
When we want to add 1 more item, our array is full, so we expand it 2x in size to 2 items, we copy the old 1 item at the start and in constant time we add the new item at the end. The copy operation takes steps.
We want to add a 3rd item, but we have capacity of 2, we expand the array to 4 in steps and add the new item to the end in constant time.
We want to add a 4th item, and we have capacity of 4 so we can add it to the end in constant time.
In conclusion, every time we want to add an item in position we have to expand with complexity . All other additions are with
comlexity.
So in the end we have where
. If we sum these numbers we will get n from the 1s and 2n from the powers of 2. In conclusion adding n items costs us
time. In other words amortized
per item.
A stack is a restricted data structure - allows access only to the element at the top of the stack.
Add elements to the top, take from the top.
LIFO = Last In First Out
Overflow - Adding too many elements and the stack cannot contain them
Underflow - Try to access the top element when the stack is empty
| Stack with | Dynamic Array | Linked list |
|---|---|---|
| push() | Amortized |
|
| pop() | Amortized |
|
| peek()/top() | ||
| clear() | ||
| isEmpty() | ||
| initialize | ||
| merge |
- Undo/Redo in programs
- Reverse word/array
- Programming languages are usually compiled down and work as a pushdown automaton
- Syntax parsing - used by compilers
- Switching between infix and prefix notation
- Backtracking
Add elements to the back, take from the front.
FIFO = First In First Out
| Stack with | Dynamic Array | Linked list |
|---|---|---|
| push()/enqueue() | Amortized |
|
| pop()/dequeue() | Amortized |
|
| peek()/top() | ||
| clear() | ||
| isEmpty() | ||
| initialize |
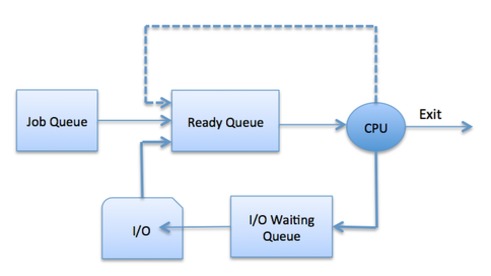
- System processes
- Interactive processes
- Background processes
- Batch process
- CPU scheduling
- Synchronize data transfer
- Print spooler
- First-come-first-serve (servers for example)
Ring buffers are queues where the new data can overwrite the old data when needed. It’s like a queue implemented with an array, providing limited space. Problem that can occur if the pointer for adding new data reaches the pointer for fetching data, in other words the front pointer and the back pointer must never overlap.

- Chats
- Real-time processing
A queue implemented with 2 linked lists.
https://ucsd-progsys.github.io/liquidhaskell-tutorial/09-case-study-lazy-queues.html
Other interesting topic to research https://en.wikipedia.org/wiki/Persistent_data_structure
A tree is a hierarchical data structure. A tree has one root node (one starting element) and all other elements are children/grandchildren/etc. of this root element.

The root in the picture above is 2. Its children are 7 and 5. 5 is a child of the root 2 and also the parent of 9.
There are 2 ways to keep the Nodes in the tree connected.
- Each parent has pointers to its children. (The classic widely used approach)
- Each node has a pointer to its parent. (Not widely used in most algorithms, but still very useful in some particular problems)
- 1 and 2 combined - Each node has pointers to its children and a pointer to its parent. This makes the traversal of the tree very easy in each direction, but also takes more memory.
struct Node {
int data;
Node* left = nullptr;
Node* right = nullptr;
};struct Node {
int data;
vector<Node*> children;
};Preorder traversal is also known as DFS (Depth First Search).
Time complexity , where
n is the number of nodes in the tree.
The order in which we visit nodes is
- Current node
- Children of the node in order from left to right
void DFS(Node* current) {
if (current == nullptr) {
return;
}
cout << current->data; // do something with the node
DFS(current->left);
DFS(current->right);
}Time complexity , where
n is the number of nodes in the tree.
The order in which we visit nodes is
- Children of the node in order from left to right
- Current node
void Postorder(Node* current) {
if (current == nullptr) {
return;
}
Postorder(current->left);
Postorder(current->right);
cout << current->data; // do something with the node
}Time complexity , where
n is the number of nodes in the tree.
The order in which we visit nodes is
- Left child
- Current node
- Right child
void Postorder(Node* current) {
if (current == nullptr) {
return;
}
Postorder(current->left);
cout << current->data; // do something with the node
Postorder(current->right);
}Level order is also known as WFS (Width First Search) or BFS (Breadth First Search).
Time complexity , where
n is the number of nodes in the tree.
The order in which we visit nodes is
- All the nodes of level 1 (the root)
- All the nodes of level 2 from left to right (the children of the root)
- All the nodes of level 3 from left to right
- etc.
Morris order is an inorder traversal algorithm which does not use extra space for recursion or a stack. However it changes the tree during traversal and then reverts it to its original state.
https://en.wikipedia.org/wiki/Tree_traversal#Morris_in-order_traversal_using_threading
A tree where each node stores whatever data we need and has an arbitrary number of children.
struct Node {
int data;
std::vector<Node*> children;
}A binary search tree is a tree with the following properties
- Each node has at most 2 children (left and right)
- The value of the left child of a node is smaller than the value of the parent
- The value of the right child of a node is bigger than the value of the parent
struct BST {
int data;
BST* left;
BST* right;
}| BST operation | Average case | Worst case |
|---|---|---|
| insert(key) | ||
| remove(key) | ||
| find(key) | ||
| findMin() | ||
| findMax() |
The order in which we receive the data is important! If we receive ordered array [1, 2, 3, 4, ...] we will constantly add in the right subtree. Therefore we will hit the worst case per operation.
AVL Tree is a BST tree which also has information on each node what is the height of the node. This allows it to balance itself and always keep the height as small as possible.
struct BST {
int data;
int height;
BST* left;
BST* right;
}| BST operation | Average case | Worst case |
|---|---|---|
| insert(key) | ||
| remove(key) | ||
| find(key) | ||
| findMin() | ||
| findMax() |
The order in which we receive the data doesn’t matter because the tree balances itself to always have the smallest possible height.
Balancing is done using the height kept in the nodes. To use the height a Balance Factor (BF) is calculated on each node. . Depending on the value of the balance factor there are the following 2 situations:
- If the balance factor is between -1 and 1 then the node is balanced.
- if the balance factor less than -1 or more than 1 (e.g -2 or 2), the node is not balanced and we must balance it.
If a node is unbalanced we can have 4 rotations that we can do:
- RR (Right Right) - For the current node the right subtree is heavier. For the right child of the current node the right subtree is heavier.
- RL (Right Left) - For the current node the right subtree is heavier. For the right child of the current node the left subtree is heavier.
- LL (Left Left) - For the current node the left subtree is heavier. For the left child of the current node the left subtree is heavier.
- LR (Left Right) - For the current node the left subtree is heavier. For the left child of the current node the right subtree is heavier.
void calculateHeight() {
height = 0;
if (left) {
height = max(height, left->height + 1);
}
if (right) {
height = max(height, right->height + 1);
}
}
int leftHeight() const {
if (left) {
return left->height + 1;
}
return 0;
}
int rightHeight() const {
if (right) {
return right->height + 1;
}
return 0;
}
void recalculateHeights() {
if (left) {
left->calculateHeight();
}
if (right) {
right->calculateHeight();
}
this->calculateHeight();
}
int balance() const {
return leftHeight() - rightHeight();
}void rotateRight() {
if (!left) {
return;
}
Node* leftRight = this->left->right;
Node* oldRight = this->right;
swap(this->data, this->left->data);
this->right = this->left;
this->left = this->left->left;
this->right->left = leftRight;
this->right->right = oldRight;
}
void rotateLeft() {
if (!right) {
return;
}
Node* rightLeft = this->right->left;
Node* oldLeft = this->left;
swap(this->data, this->right->data);
this->left = this->right;
this->right = this->right->right;
this->left->left = oldLeft;
this->left->right = rightLeft;
}void fixTree() {
if (balance() < -1) { // Right is heavier
if (right->balance() <= -1) { // RR
this->rotateLeft();
recalculateHeights();
}
else if (right->balance() >= 1) { // RL
right->rotateRight();
this->rotateLeft();
recalculateHeights();
}
}
else if (balance() > 1) { // Left is heavier
if (left->balance() >= 1) { // LL
this->rotateRight();
recalculateHeights();
}
else if (left->balance() <= -1) { // LR
left->rotateLeft();
this->rotateRight();
recalculateHeights();
}
}
}}Node* _insert(int value, Node* current) {
// insert from BST
current->calculateHeight();
current->fixTree();
return current;
}Node* _remove(int value, Node* current) {
// remove from BST
current->calculateHeight();
current->fixTree();
return current;
}