Upute za postavljanje Turlebot3 robota u Bike konfiguraciji. Službeni e-manual na kojeg se ove upute često referenciraju nalaze se OVDJE -Službene Turtlebot3 upute.
Robot složite slijedeći Turtlebot3 upute koje se nalaze u kutiji robota te pokušavajući emulirati bike dizajn koji je prikazan na slici. Pritom pazite da ostavite dovoljno mjesta za sve potrebne komponente koje spajamo od dna prema vrhu slijedećim redosljedom:
- Baterija
- OpenCR
- Raspberry Pi
- Lidar - laserski skrener
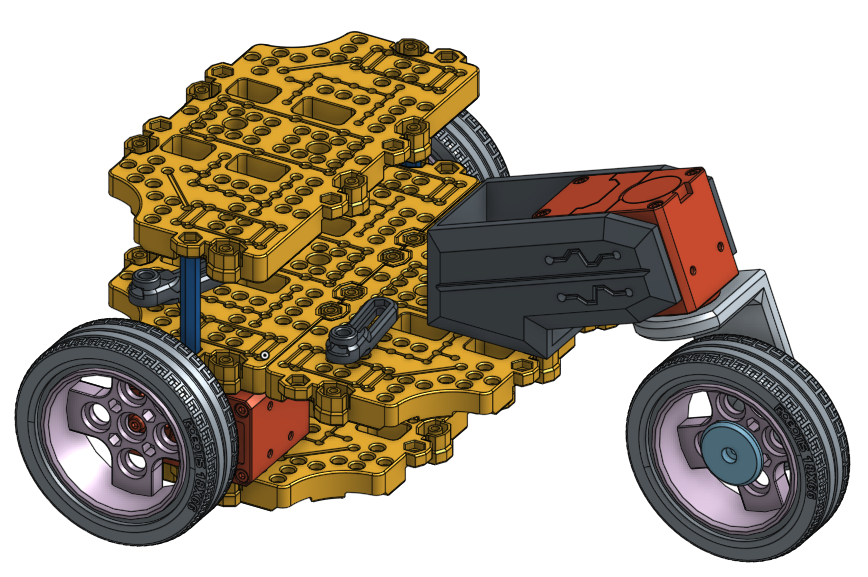
Na ovom linku možete pronaći CAD model Turtlebot3 Bike.
Prije programiranja OpenCR pločice koja služi kao kontroler za Dynamixel motore potrebno je postaviti ID svih motora te promijeniti modalitet rada prednjeg motora.
ID motora mora odgovarati konfiguraciji na slici, koje postavljamo korištenjem programa iz Arduino IDE File -> Examples -> OpenCR -> DynamixelWorkbench -> d_ID_Change .

Motoru s ID-jem 3 potrebno je promjeniti način rada iz wheel mode u joint mode isto tako korištenjem OpenCR i defaultnog programa u Arduino IDE File -> Examples -> OpenCR -> DynamixelWorkbench -> f_Mode_Change .
Po završteku procesa postavljanja motora na OpenCR pločicu uploadamo program koji se nalazi u OpenCR direktoriju ovog Git repozitorija.
U slučaju da se prilikom testiranja teleop-a robot rotira u suprotnom smjeru u programskom kodu (OpenCR/bike_motor_driver.h) zamjenite ID-jeve 1 i 2 za lijevi i desni kotač.
Raspberry Pi postavite slijedeći upute na službenom e-Manualu slijedeći poglavlje 6.2.1. Raspberry Pi 3 Setup te odaberite Ubuntu Mate.
Na udaljenom račuanlo koje će upravljati robotom potrebno je instalirati sve potrebne pakete slijedeći poglavlje 6.1. PC Setup
Prije pokretanja bilo koje od funkcionalnosti (Teleop, SLAM, Navigacija) potrebno je pokrenuti sve naredbe u poglavlju 7. Bringup.
Za korištenje robota i njegovih funkcionalnosti udaljeno upravljanje (Teleop), SLAM-a i Navigacije se izvršava prateći poglavlja na službenom eManual 8. Basic Operation, 9. SLAM i 10. Navigation.

Sam projekt je nadograđen na način da je implementirana mogućnost upravljanja robotom putem web sučelja i prijenosa streaminga s istog, aplikacija se nalazi ovdje