


{kind=link}
{kind=link}
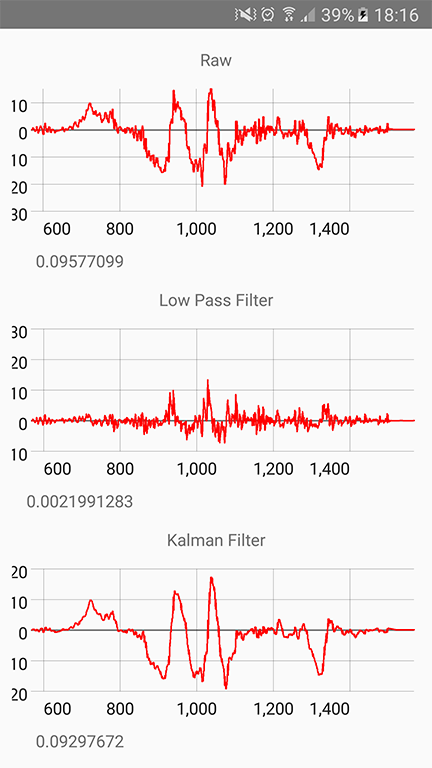
Removes the noise from float streams using Kalman Filter. Useful to smoothen sensory data e.g.: gps location, or Accelerometer.
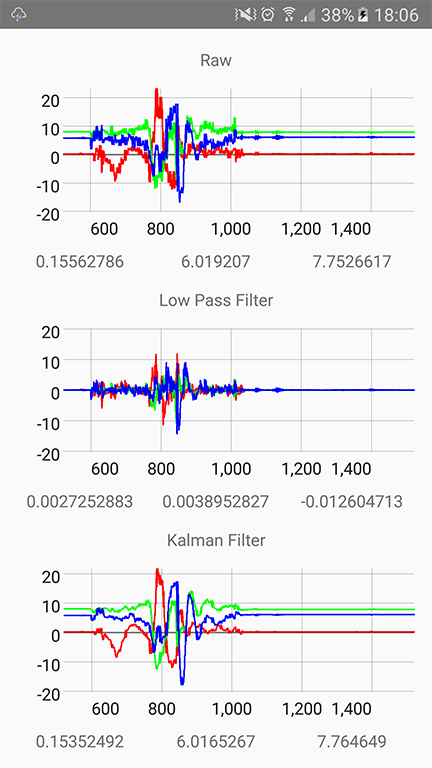
Library is supporting up to 3 values smoothened from a stream.
(float) stream
KalmanRx.createFrom1D(floatObservable.map(e -> e.value))
.subscribe(value->{}, Throwable::printStackTrace);(float, float) stream
KalmanRx.createFrom2D(floatObservable.map(e -> e.values))
.subscribe(values->{}, Throwable::printStackTrace);(float, float, float) stream
KalmanRx.createFrom3D(floatObservable.map(e -> e.values))
.subscribe(value->{}, Throwable::printStackTrace);implementation 'com.github.kibotu:KalmanRx:-SNAPSHOT'graldew clean buildgradlew clean assembleRelease test javadoc- JDK8
- Android Build Tools 27.0.3
- Android SDK 27
Follow me on Twitter: @wolkenschauer
Let me know what you think: jan.rabe@kibotu.net
Contributions welcome!
Copyright 2016 Jan Rabe Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at http://www.apache.org/licenses/LICENSE-2.0 Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.