About rotation matrix form #809
Description
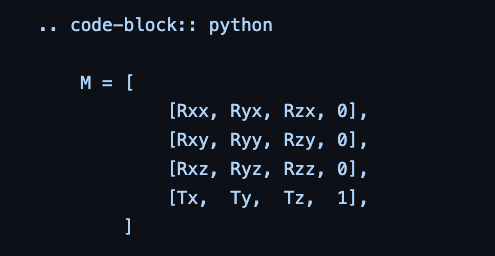
In your class Transform3d, I found that all the transformation matrix is the form of transform3d
Since you use right matrix multiply, this would be reasonable.
And in the PerspectiveCamera init, the R and T matrix is sent and then initialized as Rotate or Translate class(subclass of Transform3d) , so the R and T should be the form like the foremost one transform3d I think?
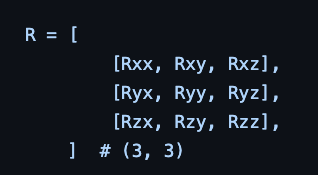
While in your rotation_conversion, the rotation matrix is the form of this. rotation_conversion
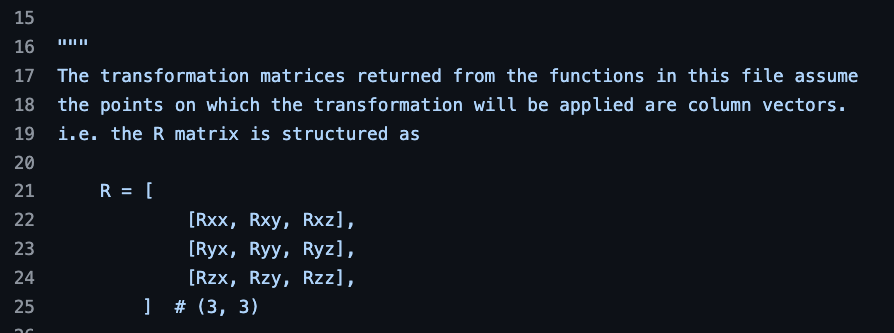
Which suits our habits since we all learn left matmul in linear algebra. (like [R| T]X)
Here is the question:
- So if I want to use the rotation matrix in cameras from the rotation_conversion, I should do the R.permute(0, 2, 1) firstly?
- What's the form of the R, T, K in your PerspectiveCameras and other cameras?
or