MRISA stands for Multi-Robot Interactive Simulation and Analysis platform.
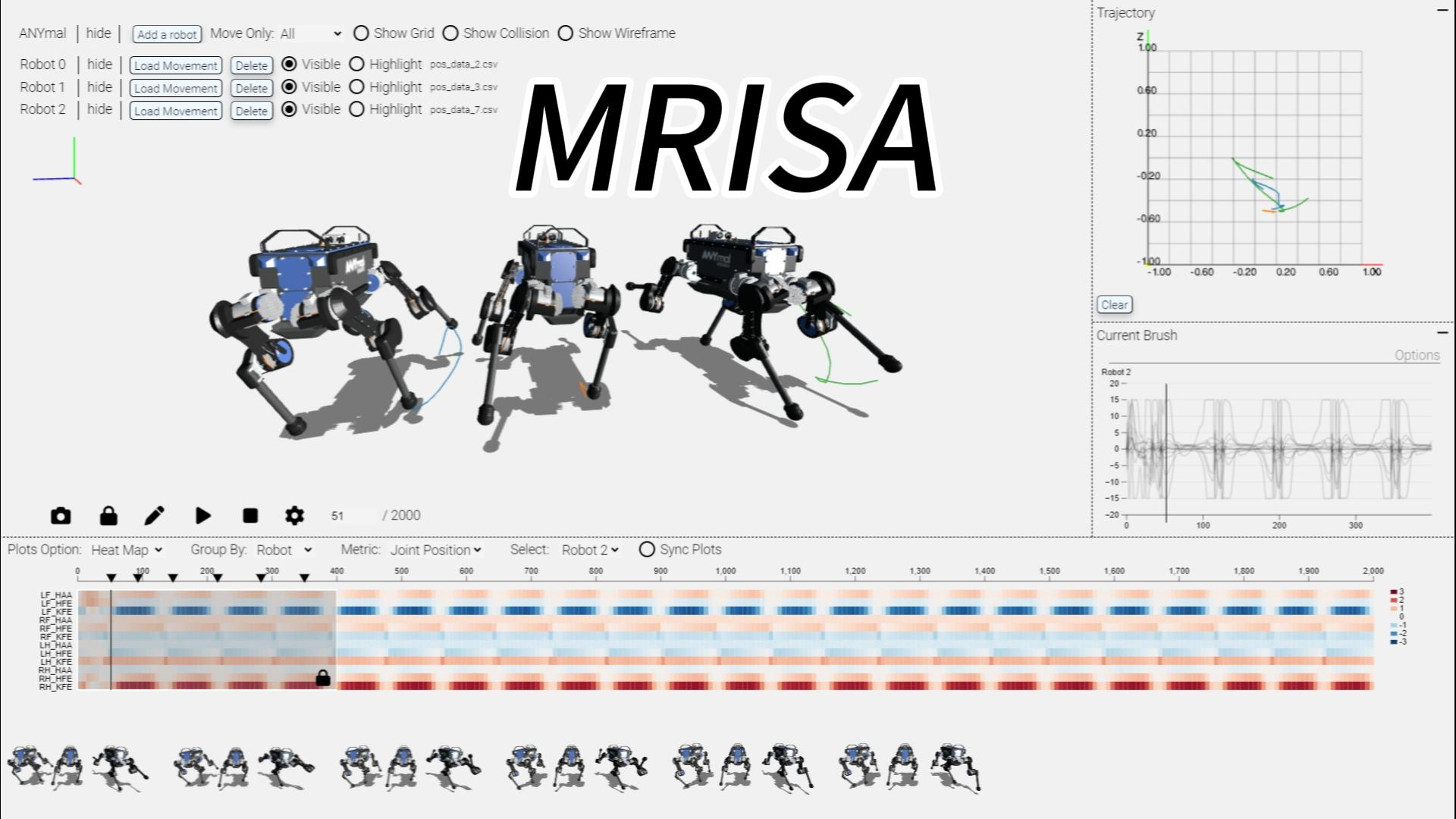
MRISA provides a browser-based environment for visualizing and interacting with multiple robot simulations. You can try out the platform using our GitHub Page and sample data:
Demo Data
To test the platform, you can use the following demo data files:
Demo Video
To see the video of the introduction and usage cases, you can visit:
If you'd like to install and run MRISA locally (recommended for faster loading and custom robot support), follow these steps:
git clone https://github.com/linan1109/MRISA.git
cd MRISA/javascript/
npm install
npm run startThen, open your browser and go to: http://localhost:9080/dev-bundle/index.html (or change the port as shown in your terminal).
This project is built based on urdf-loaders. And the URDF model of ANYmal is from RaiSim's anymal.
We gratefully acknowledge the authors and contributors of these open-source projects.
The software is available under the Apache V2.0 license.
Copyright © 2020 California Institute of Technology. ALL RIGHTS RESERVED. United States Government Sponsorship Acknowledged. Neither the name of Caltech nor its operating division, the Jet Propulsion Laboratory, nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.