Calibration Update: handling a subset of polygons, new args, dataset handling, and more.#7
Conversation
* Renamed script from calibration_pipeline.py to just calibrate.py * Introduced a number of arguments to execute portiions of the pipeline and only for specified polygon positions * Doesn't throw an error if the datasets/ dir already exists * Defaults to 1 image per polygon position (vs. 5) so total default images = 13 vs. 65 for a faster flow. * Adds more incremental logging messages
The video stream image is to large to display both left/right on my external monitor. It's not possible to allow window resize w/o Qt. Reduce size by 1.5x before displaying.
 Luxonis-Brandon
left a comment
Luxonis-Brandon
left a comment
There was a problem hiding this comment.
Sweet, thanks! Will be nice even for Brian’s and my effort doing calibration.
|
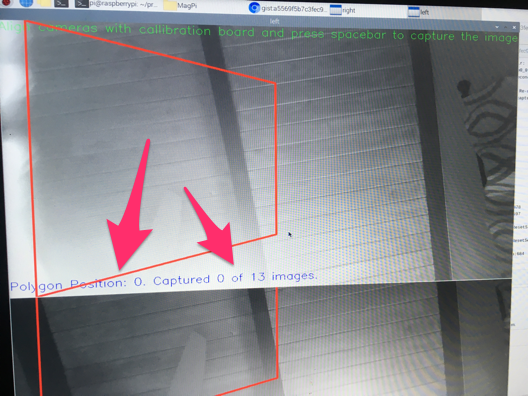
Updated image capture display displays progress:
|
I haven't been able to reproduce this for a while. Workaround: click the restart button on the board. |
|
@Luxonis-Brandon @Luxonis-Brian - this is ready for you to try. Let me know if I should merge this into master or if you'd rather experiment with this branch first. |
|
Thanks. I’d say merge to master. And @Luxonis-Brian has the boards/computers now but I could come over and try with him. @Luxonis-Brian - want to give it a shot when you have a second? |
|
Merged! To run calibration: To see usage info: |
I added code to reduce the size by 1.5x, but the frame rate was too slow on the Pi, so I reverted this in 95a8854. |
DepthAI-API support for macOS
Calibration Update: handling a subset of polygons, new args, dataset handling, and more.
Calibration fix when EEPROM is not programmed.
Adds a number of modifications to the calibration flow:
calibration_pipeline.pyto justcalibrate.pyUsage:
Known issues
Test this process on a full run of 13 polygons. Ensure it works.calibrate.py -p 3 5), all of the images in the set are validated again for corner detection. This can be slow - we could only validate the specified polygons.Add example usage. See this SO question.For me, cv2 imshow displays for the video stream won't both fit on my large external monitor and can't be resized./cc @Luxonis-Brandon @Luxonis-Brian