Object Detection and Tracking Systems with Stereo Vision for Autonomous Driving
- Obtaining disparity image in order to obtain depth information of the each pixel of the image
- Changing one of the image channels with disparity image
- Observing the effect of the change on object tracking algorithms( CSRT , MOSSE etc.)
- Ubuntu 16
- Virtual Box
- OpenCV
- CMake
- C ++
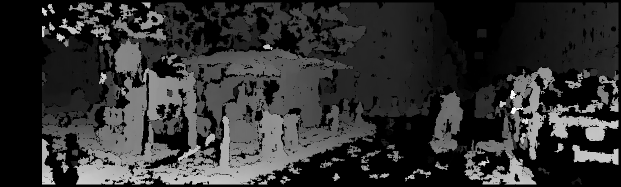
Disparity Image
Unfiltered Bounding Boxes
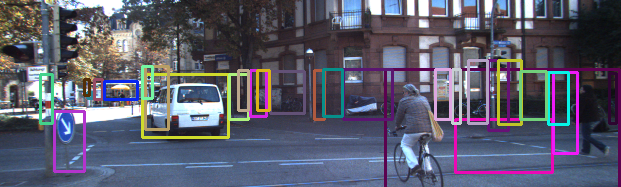
Filtered Bounding Boxes

The image having a disparity image as third channel

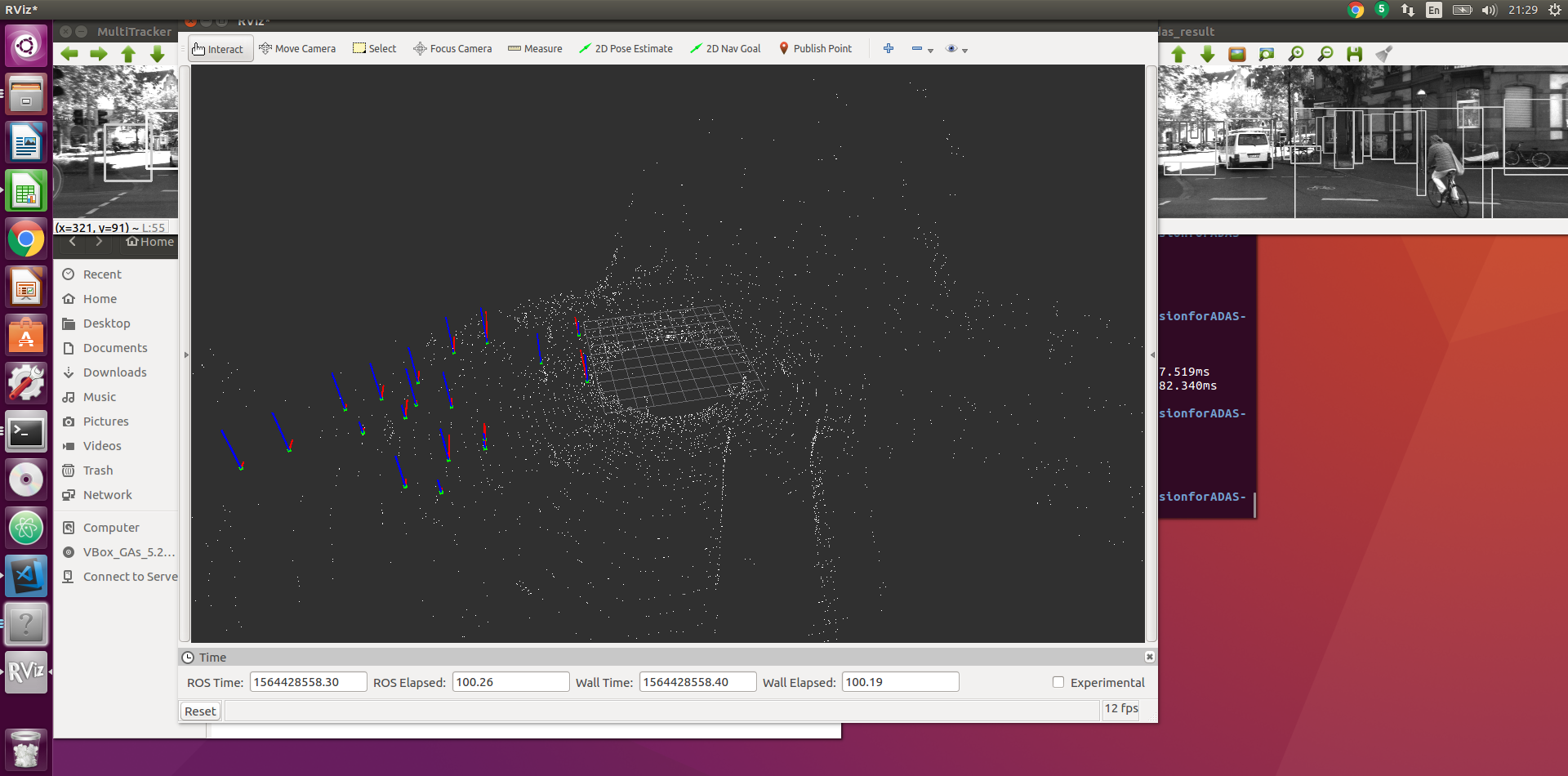
3D represantation of the objects at ROS Rviz environment