Orientation Covariance Display #1191
Description
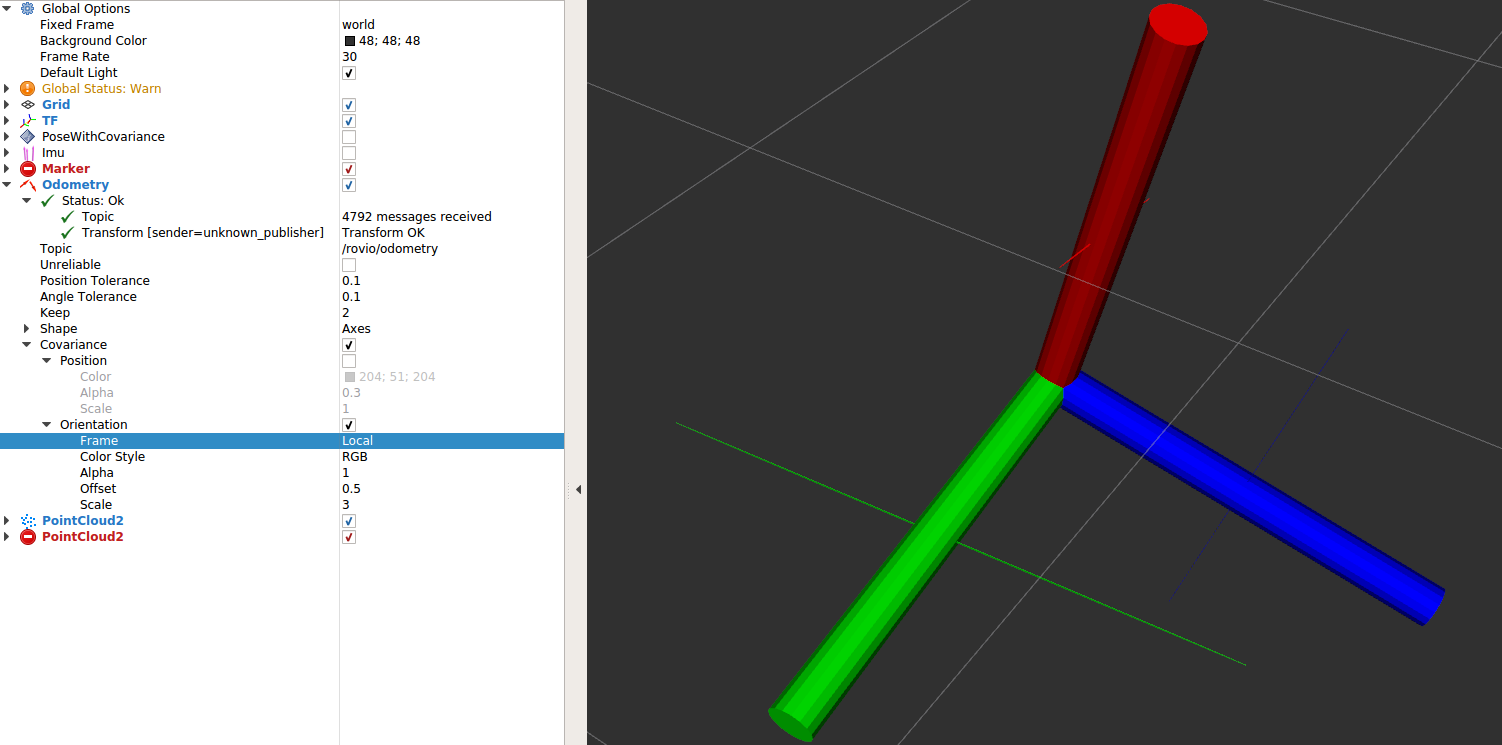
I have an odometry message with covariance coming from visual inertial odometry (ROVIO). With this, the orientation covariance should be low for roll and pitch (observable due to gravity), and high for yaw (not observable). I see the covariance disks being almost 1-d lines like expected, however I cannot make sense of them. It seems to me that at least one would need to be oriented otherwise for the display to be self-consistent. But maybe I am reading this wrong?
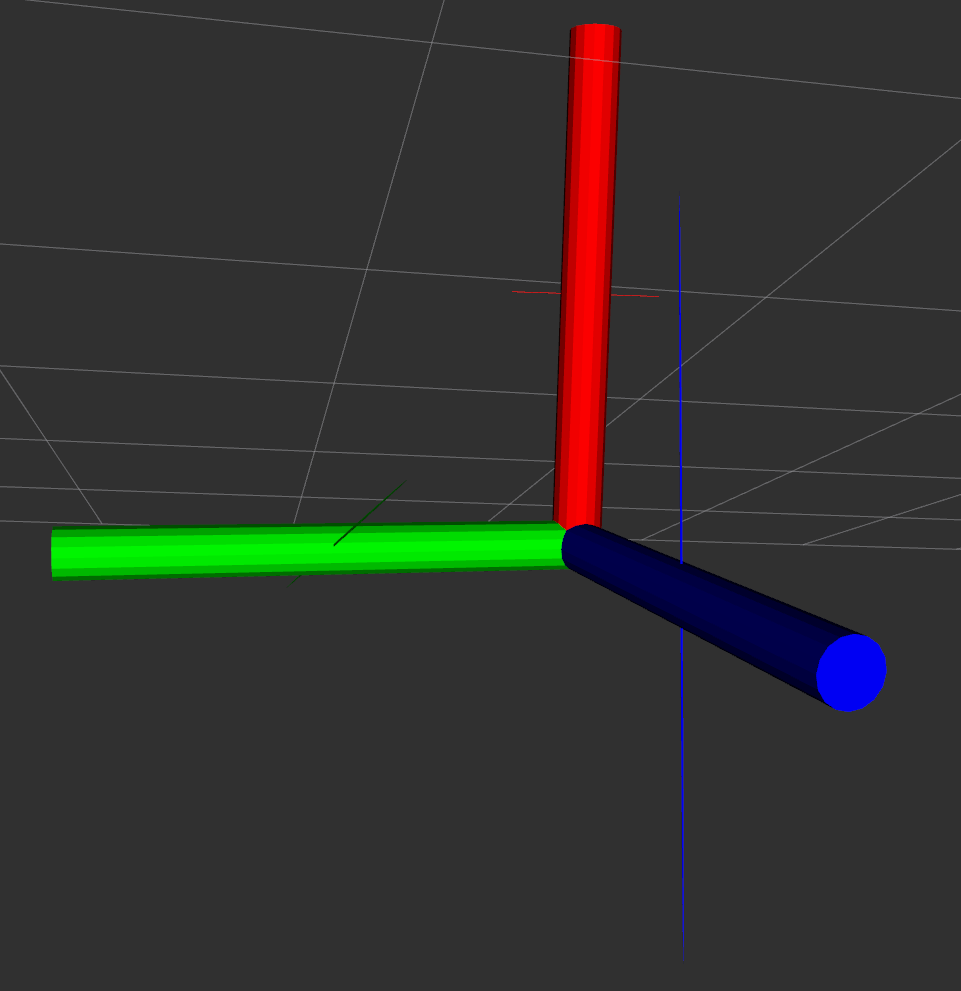
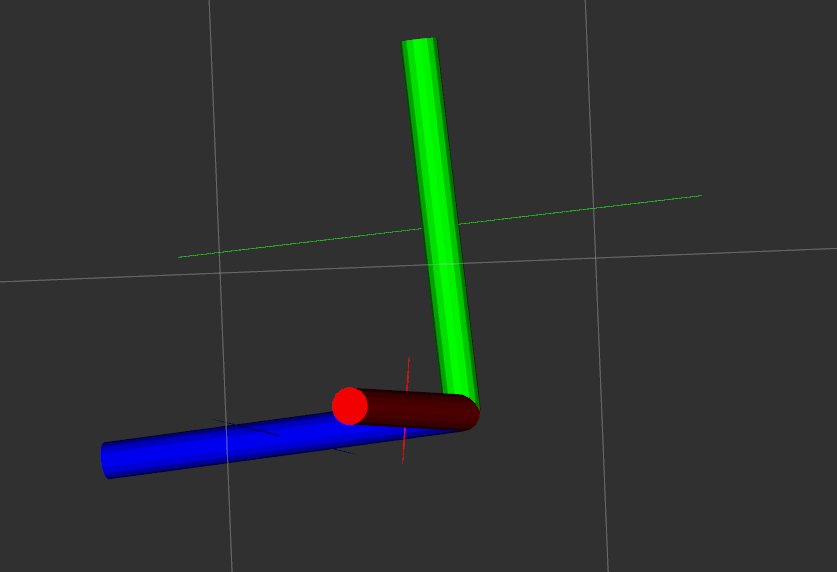
The first two screenshots are prespective from 2 different angles, the last one is orthographic from top down. As you can see x is pointing almost up. The covariance for the y axis makes sense, i.e. an almost horizontal line corresponds to uncertainty almost only in yaw. However the z axis should also have the same near-horizontal line, but it is almost vertical, which doesn't make sense to me. The covariance for the x axis makes sense again, since due to the slight tilt there is a small yaw component, indicated by a smaller horizontal line perpendicular to the tilt direction.
In fact, it would make sense to me, if the y covariance was about the same shape, just near-horizontal instead of near-vertical.
Cam someone explain what's going on? Am I interpreting these covariances wrong? Might there be an issue with the visualization?
cc @Ellon